

Composite learning sliding mode control method for non-minimum phase aircraft
A non-minimum phase, control method technology, applied in the field of aircraft control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment
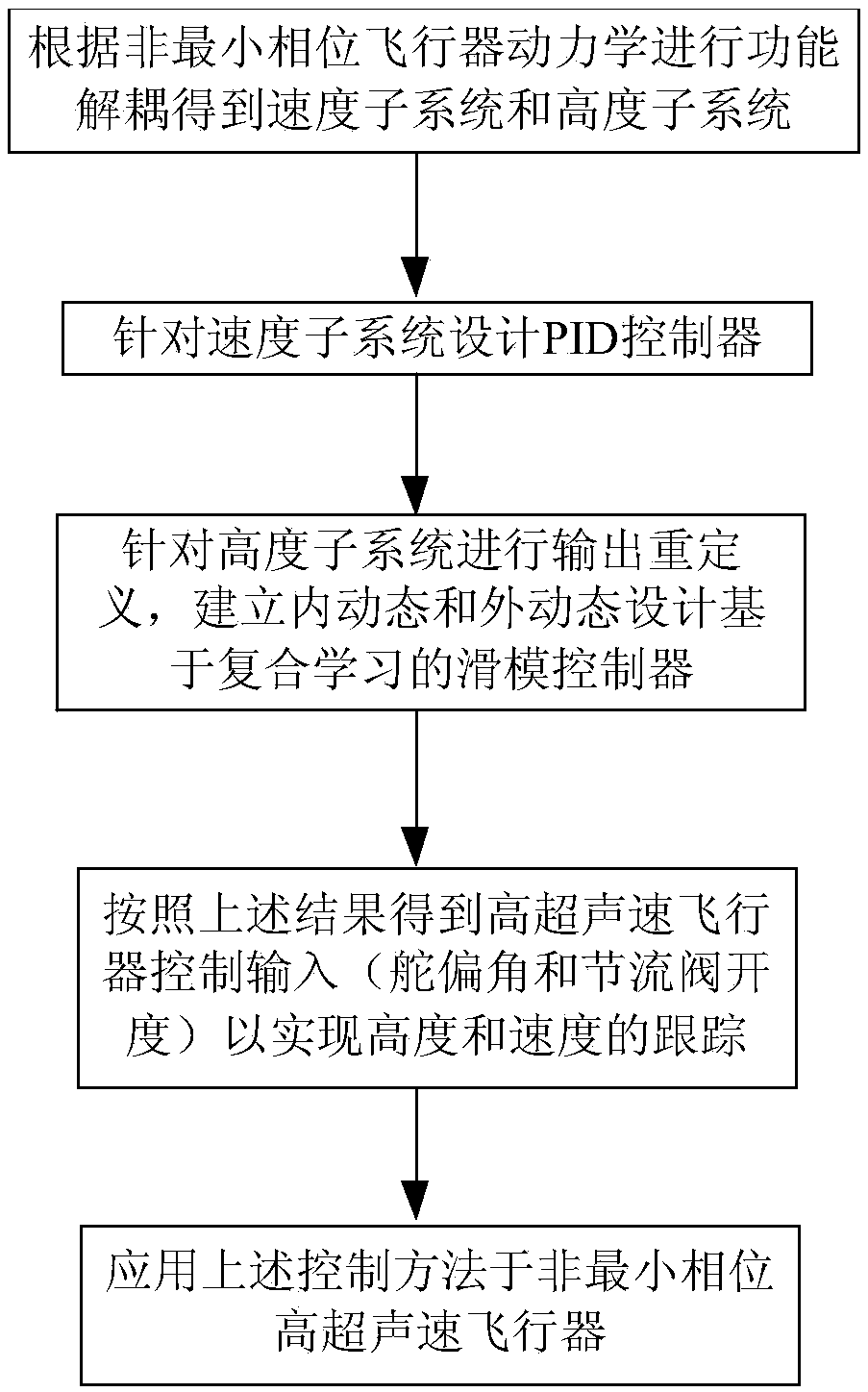
[0135] refer to figure 1 , a compound learning sliding mode control method for a non-minimum phase vehicle of the present invention is applied to a hypersonic vehicle, and is realized by the following steps:
[0136] (a) Establish a non-minimum phase hypersonic vehicle longitudinal channel dynamics model:
[0137]
[0138]
[0139]
[0140]
[0141]
[0142] Among them, V represents velocity, γ represents track inclination, h represents height, α represents angle of attack, q represents pitch angle velocity, δ eIndicates rudder deflection angle, Φ indicates throttle valve opening; T, D, L and M yy represent thrust, drag, lift and pitching moment respectively; m, I yy and g denote the mass, the moment of inertia of the pitch axis, and the acceleration due to gravity, respectively.
[0143] The relevant forces, moments and parameters are defined as follows:
[0144]
[0145]
[0146]
[0147]
[0148]
[0149]
[0150]
[0151]
[0152]...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More