

Method and system for determining homography matrix and image conversion method and system thereof
A homography matrix and image technology, which is applied in the field of image conversion method and its system, can solve the problem of low image overlap accuracy, and achieve the effect of improving calculation accuracy, improving image overlap accuracy, and high image overlap accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
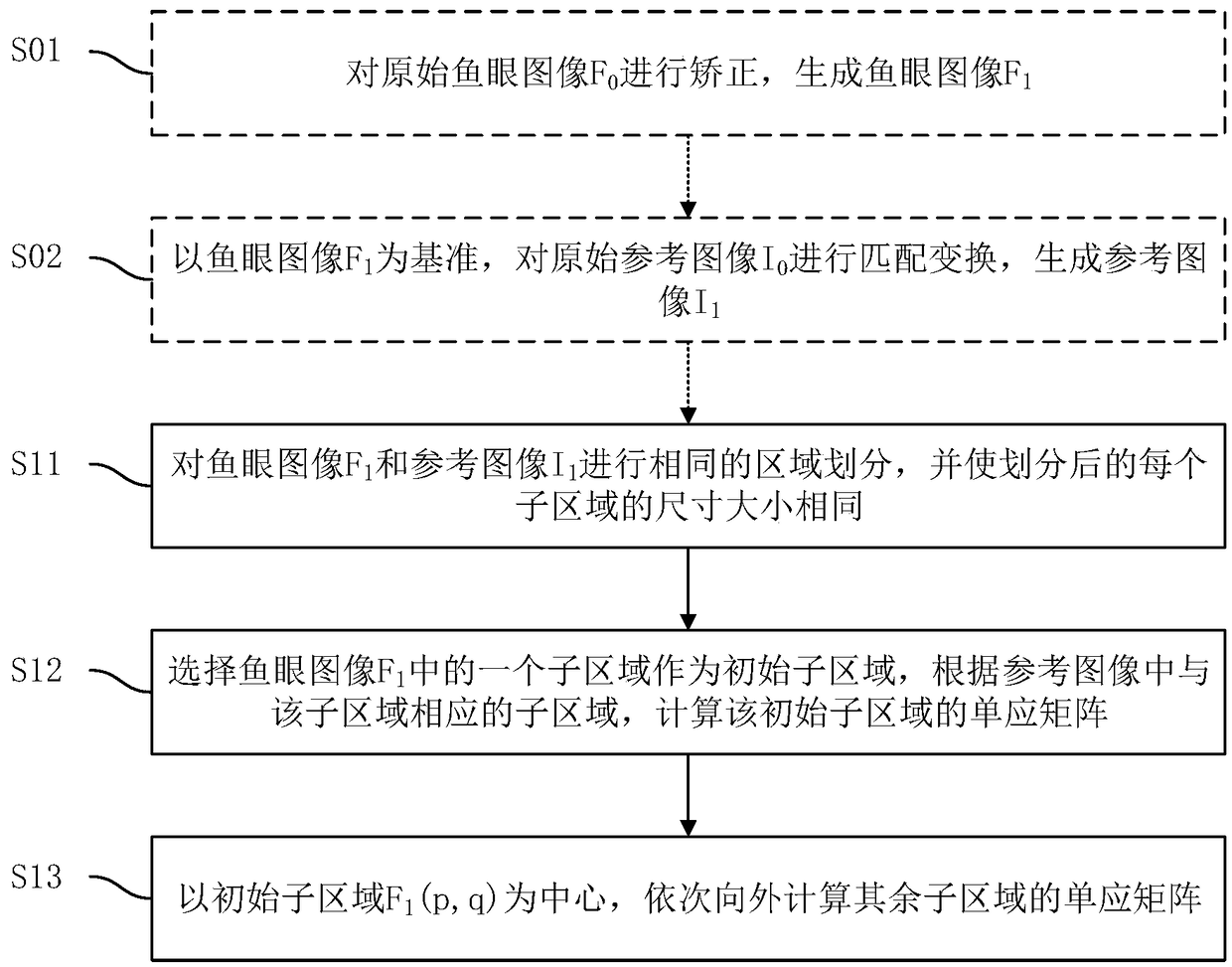
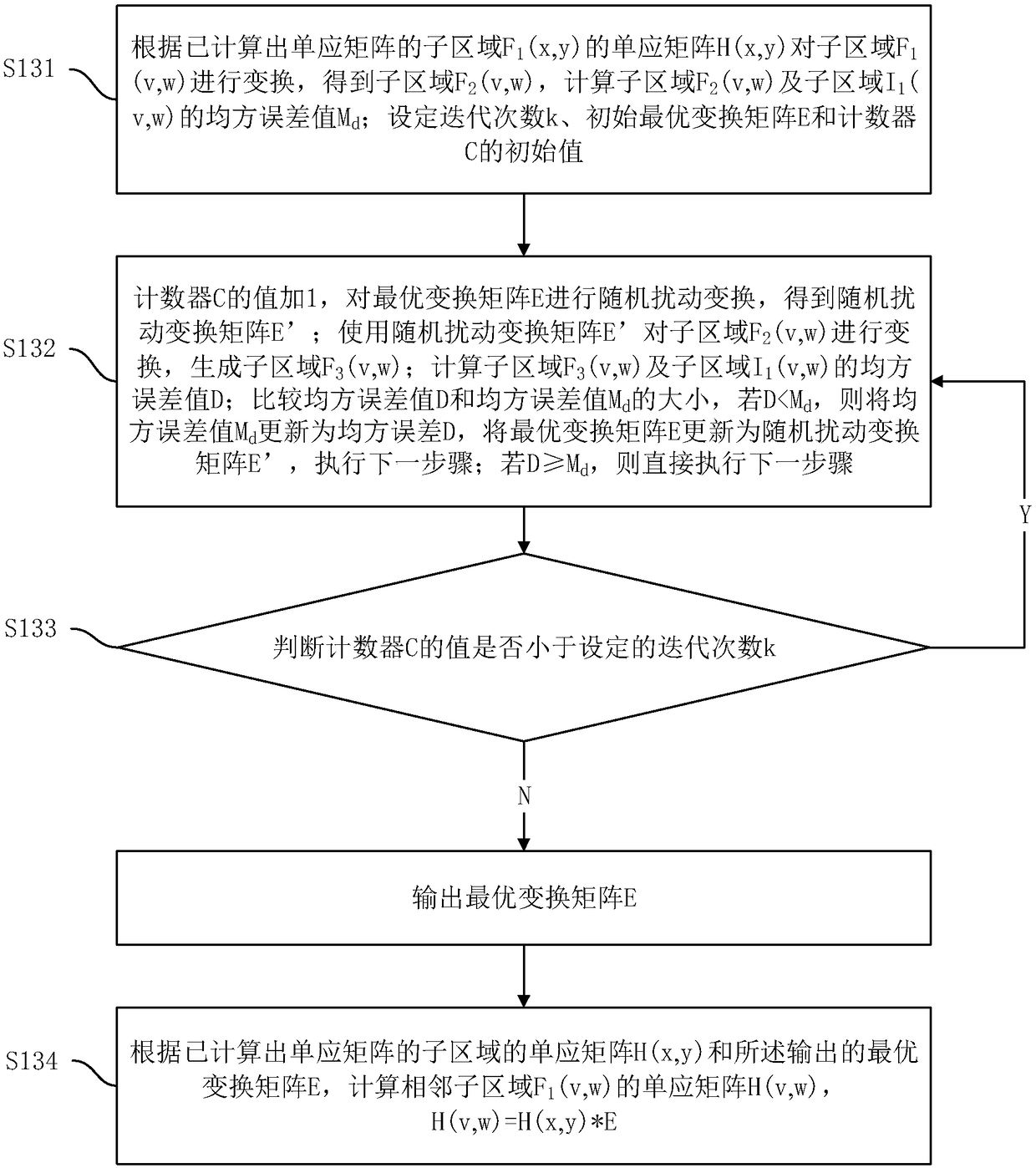
[0051] Embodiment 1 of the present invention proposes a method for determining the homography matrix, such as figure 1 As shown, the method includes the following steps:
[0052] Step S11, image area division: for fisheye image F 1 and the reference image I 1 Carry out the same area division, and make the divided fisheye image F 1 The subregion in is compared with the reference image I 1 The corresponding sub-regions in are of the same size, where the fisheye image F 1 Image from fisheye camera, reference image I 1 The fisheye image F is derived from the image formed by a common camera with a flat lens. 1 and the reference image I 1 The imaged content is the same, and the fisheye image F 1 and the reference image I 1 are the same size.
[0053] Suppose the fisheye image F 1 and the reference image I 1 Divided into m rows and n columns respectively, then each image has m*n sub-regions of the same size calculated by row and column, m and n are both natural numbers gre...
Embodiment 2
[0096] Embodiment 2 of the present invention also proposes an image conversion method, such as Figure 4 As shown, the method includes the following steps:
[0097] Step S41, determine the homography matrix: determine the fisheye image F 1 The homography matrix of each subregion in ;
[0098] The method for determining the homography matrix in step S41 is the same as the method for determining the homography matrix described in Embodiment 1, and will not be repeated here.
[0099] Step S42, sub-region image transformation: according to the homography matrix of each sub-region, the fisheye image F 1 Transform to get the transformed image F 4 , in the transformed image F 4 The area corresponding to the sub-area is intercepted, and the sub-area is transformed as the sub-area. In order to avoid that the image content at the boundary cannot be smoothly connected when each intercepted area is spliced, preferably, the intercepted area is larger than the size of the sub-area, so ...
Embodiment 3
[0120] Embodiment 3 of the present invention also proposes an image conversion system. The difference between the image conversion system proposed in Embodiment 3 and the image conversion system proposed in Embodiment 2 is that the image conversion system in Embodiment 3 may not include a determination unit The system of the homography matrix, the image conversion system in embodiment 2 includes the system of determining the homography matrix.
[0121] The image conversion system proposed in Embodiment 3 of the present invention includes a sub-region image conversion module and a sub-region boundary fusion module.
[0122] The sub-area image transformation module is used to determine the homography matrix of each sub-area according to the method for determining the homography matrix respectively, for the fisheye image F 1 Transform to get the transformed image F 4 , in the transformed image F 4 The area corresponding to the sub-area is intercepted, and the sub-area is transf...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More