A fast unmanned aerial vehicle image matching method based on fusion of local features
A technology of local features and matching methods, applied in the field of image matching, can solve the problems of large distortion, large changes in viewing angle, and inability to obtain a sufficient number of image homonymic points, and achieve the effect of improving matching accuracy and quantity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Example Embodiment
[0045] The present invention will be further described in detail below with reference to the drawings and specific embodiments.
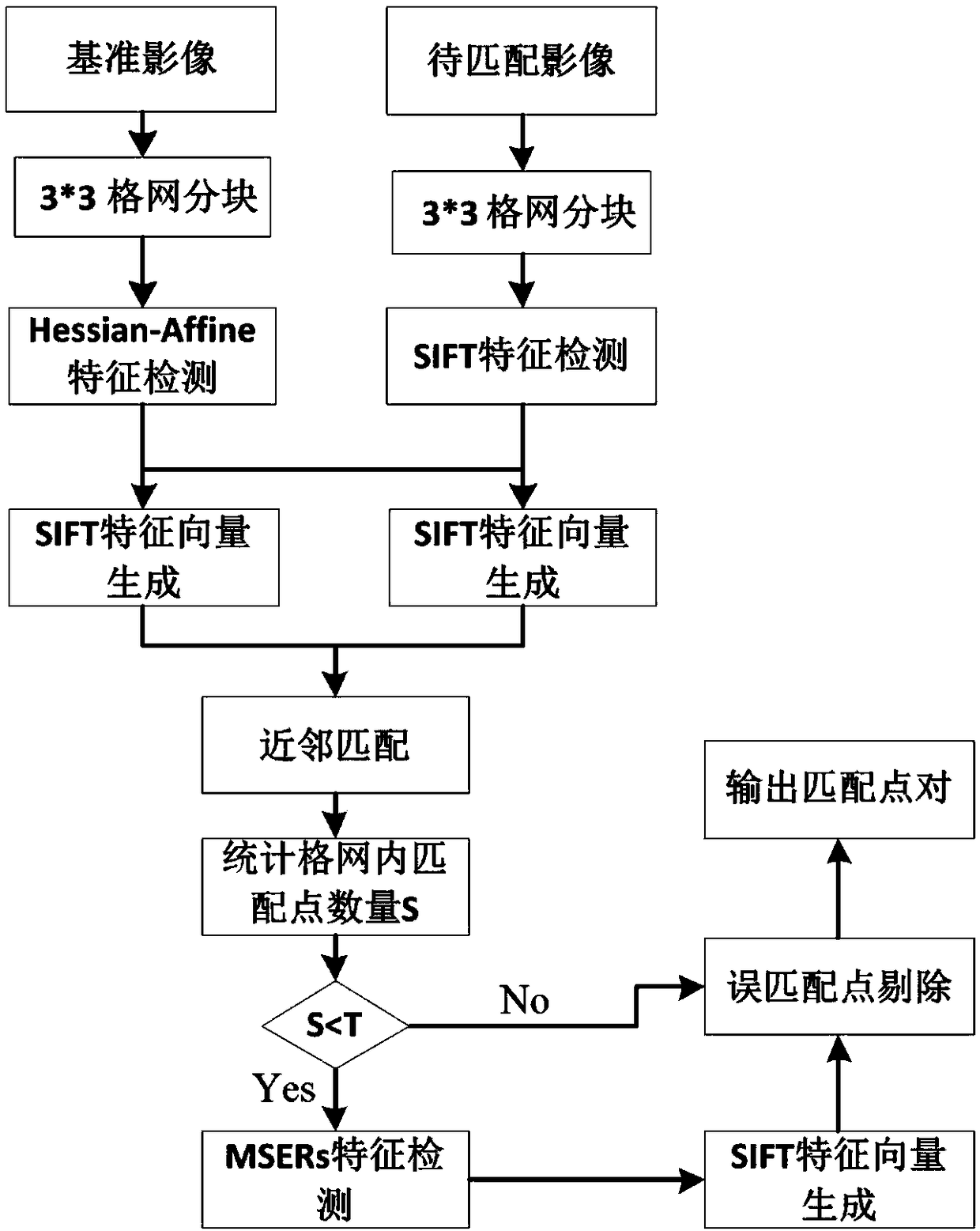
[0046] figure 1 Shown is a fast UAV image matching method based on fusion of local features. The overall steps are:
[0047] Step 1. Perform 3*3 grid segmentation on the reference image and the image to be matched, divide an image into 9 sub-regions, and extract invariant features in the sub-regions; the specific process is:
[0048] a. Perform feature detection on the reference image through the Hessian-Affine affine covariant region detector:
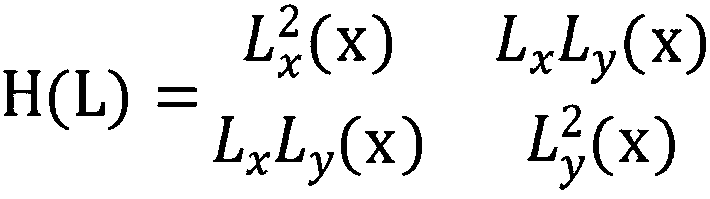
[0049] The initial feature point of Hessian-Affine is determined by the image point x second-order differential Hessian matrix H(L) and its rank DoH;
[0050]
[0051]
[0052] In the formula, L x (x) and L y (x) represents the differential results in the x and y directions after Gaussian smoothing of g(σ) is performed on the target image; with Indicates the second-order differential results in the x and y direct...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap