

Method for purifying error matching of visual image characteristic points based on ORB (Oriented FAST and Rotated BRIEF)
A purification method and visual image technology, applied in the field of image processing and computer vision, can solve the problems of not considering the quality of matching pairs, not having scale invariance, and fast computing speed.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0029] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
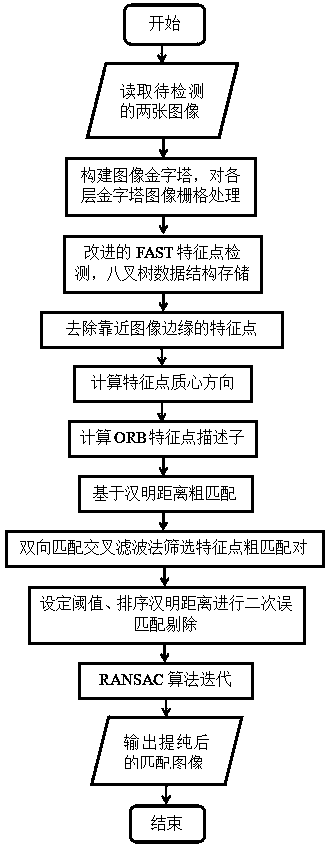
[0030] The present invention provides an ORB-based visual image feature point mismatch purification method, the main flow diagram is as follows figure 1 shown. It includes the following steps:
[0031] Step S1: Read the left and right images taken under different viewing angles to be detected, construct a scale image pyramid for the images, and perform raster processing on each layer of the pyramid image;
[0032]Step S2: Use the improved FAST feature point detection algorithm to detect feature points in each small grid of each layer of the pyramid image, use the data structure of the octree to store the extracted feature points, and determine the coordinates of the feature points;
[0033] Step S3: remove the feature points close to the edge of the image, and calculate the centroid direction of the remaining feature points;
[0034] Step S4: calcula...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More