

Limiting collaborative double-mode dexterous robot finger device
A robot finger, dual-mode technology, applied in manipulators, chucks, manufacturing tools, etc., can solve the problems of motor waste, affecting the distribution of fingers, and excessive space outside the hand, to prevent damage, improve grasping stability, enhance The effect of stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] The specific structure and working principle of the present invention will be further described in detail below in conjunction with the accompanying drawings and multiple embodiments.
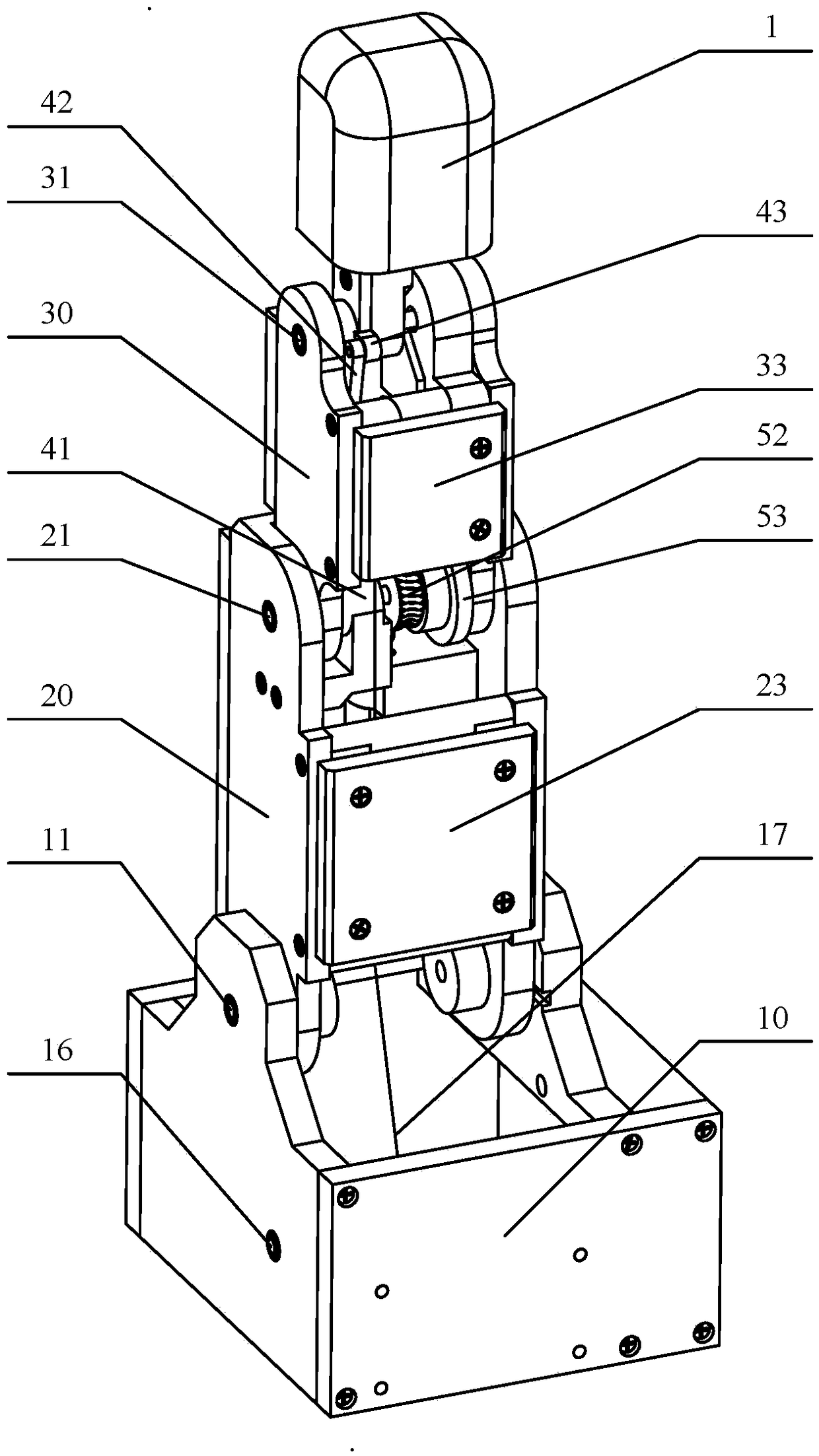
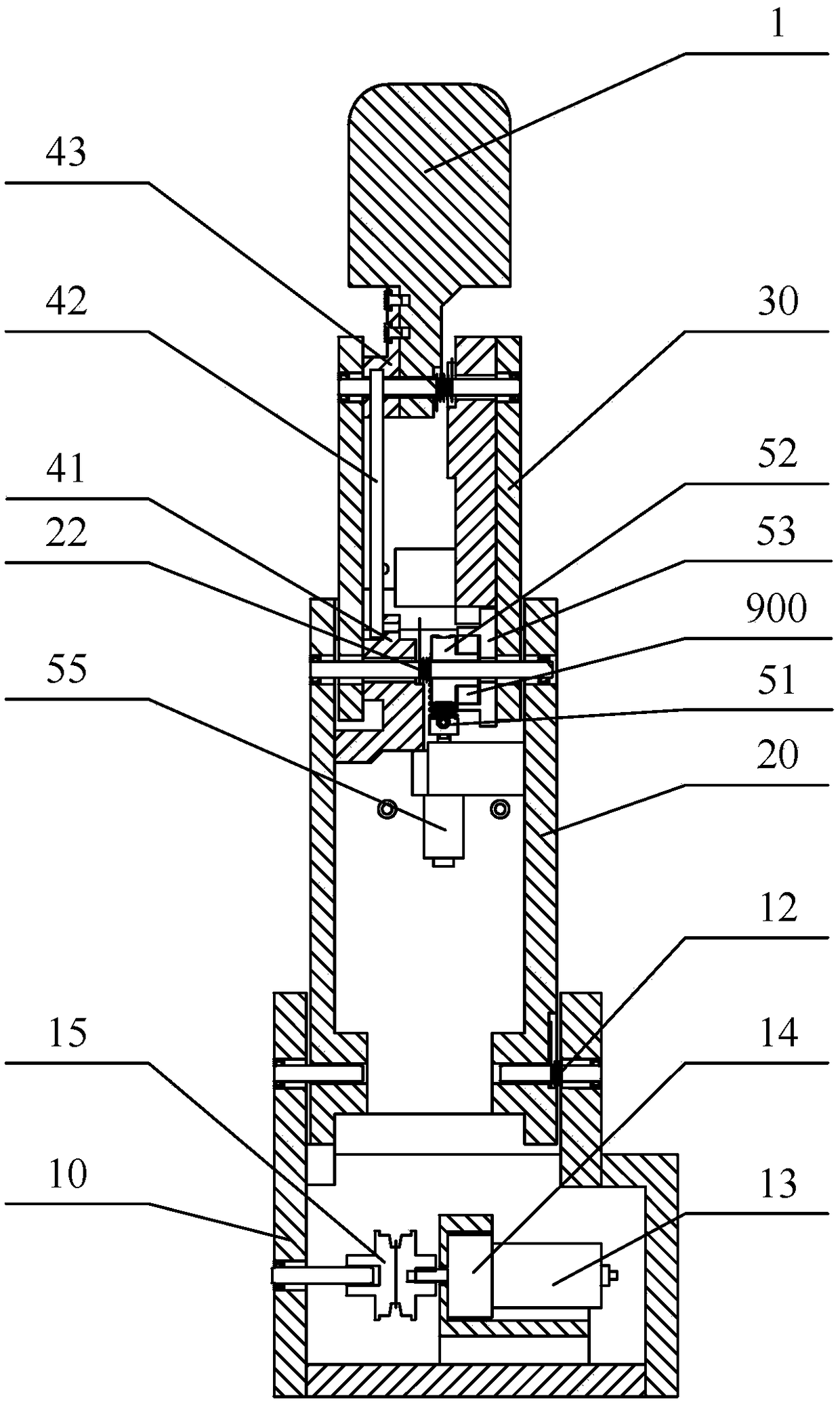
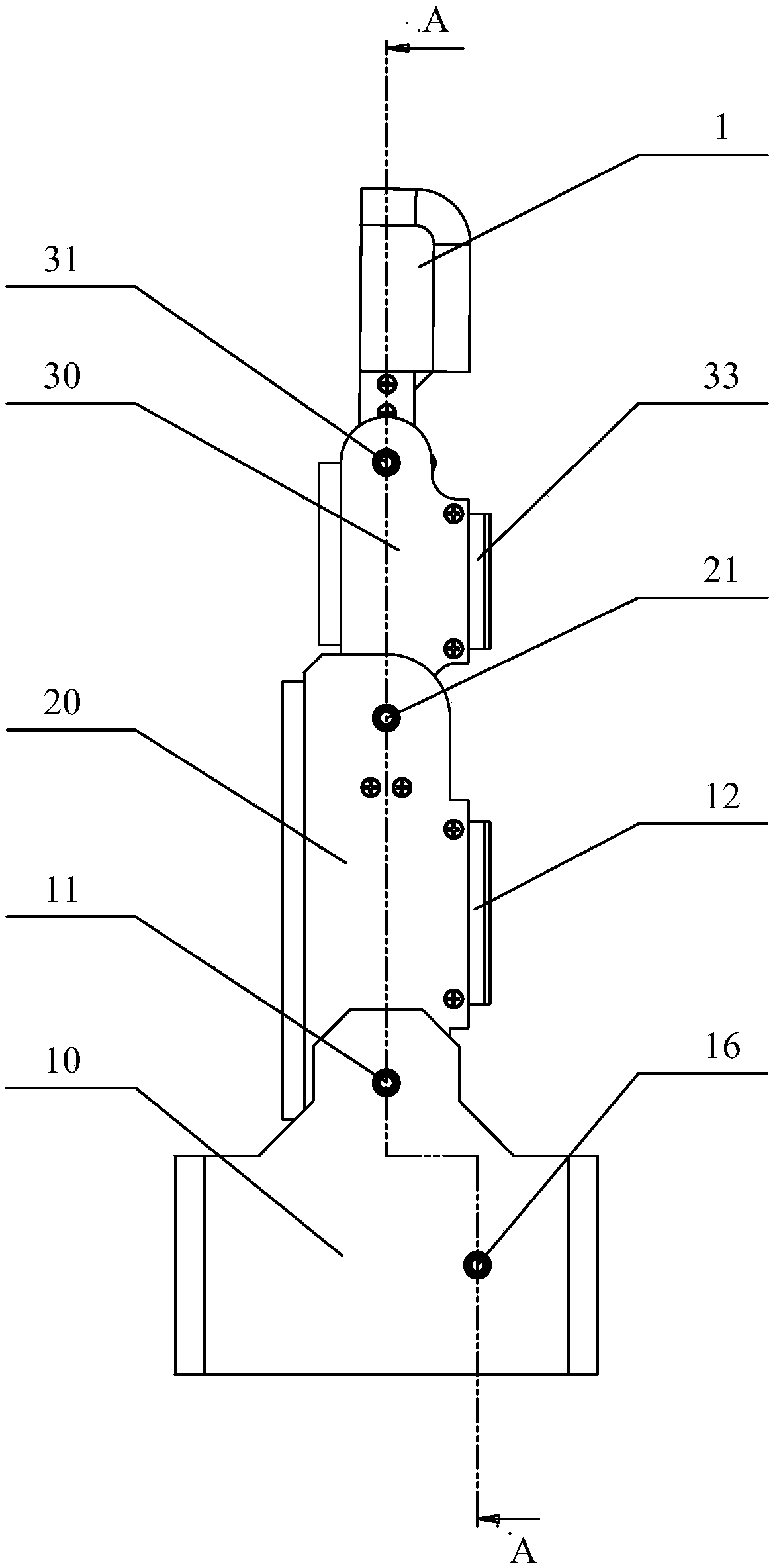
[0044] The first embodiment of the position-limiting cooperative dual-mode dexterous robot finger device designed by the present invention, as figure 1 , figure 2 , image 3 , Figure 4 , Figure 5 , Figure 6 , Figure 7 and Figure 8 As shown, it includes a base 10, a first finger segment 20, a second finger segment 30, a first joint shaft 11 and a second joint shaft 21; the first joint shaft 11 is movably sleeved in the base 10, and the The first finger segment 20 is movably sleeved on the first joint shaft 11; the second joint shaft 21 is movably sleeved in the first finger segment 20, and the second finger segment 30 is movably sleeved on the second joint shaft 21 above; the first joint axis 11 and the second joint axis 21 are parallel to each other; it is characterized in t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More