An off-line programming method for industrial robot space intersecting curve welding
An industrial robot, offline programming technology, applied in welding equipment, welding accessories, manipulators, etc., can solve the problems of lack of fusion of surrounding entity information, poor human-computer interaction, complex irregular workpieces, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0069] The present invention will be further described below in conjunction with the drawings and specific embodiments.
[0070] In order to verify the specific implementation of the present invention, a new Shida STEP SA1800 six-degree-of-freedom industrial robot with a fixed welding gun at the end was used to conduct a saddle-shaped space curve welding experiment formed by two cylinders intersecting. The radius of the main pipe in the intersecting cylinder is 150mm, and the radius of the branch pipe is 100mm. The unit of each coordinate data shown below is mm.
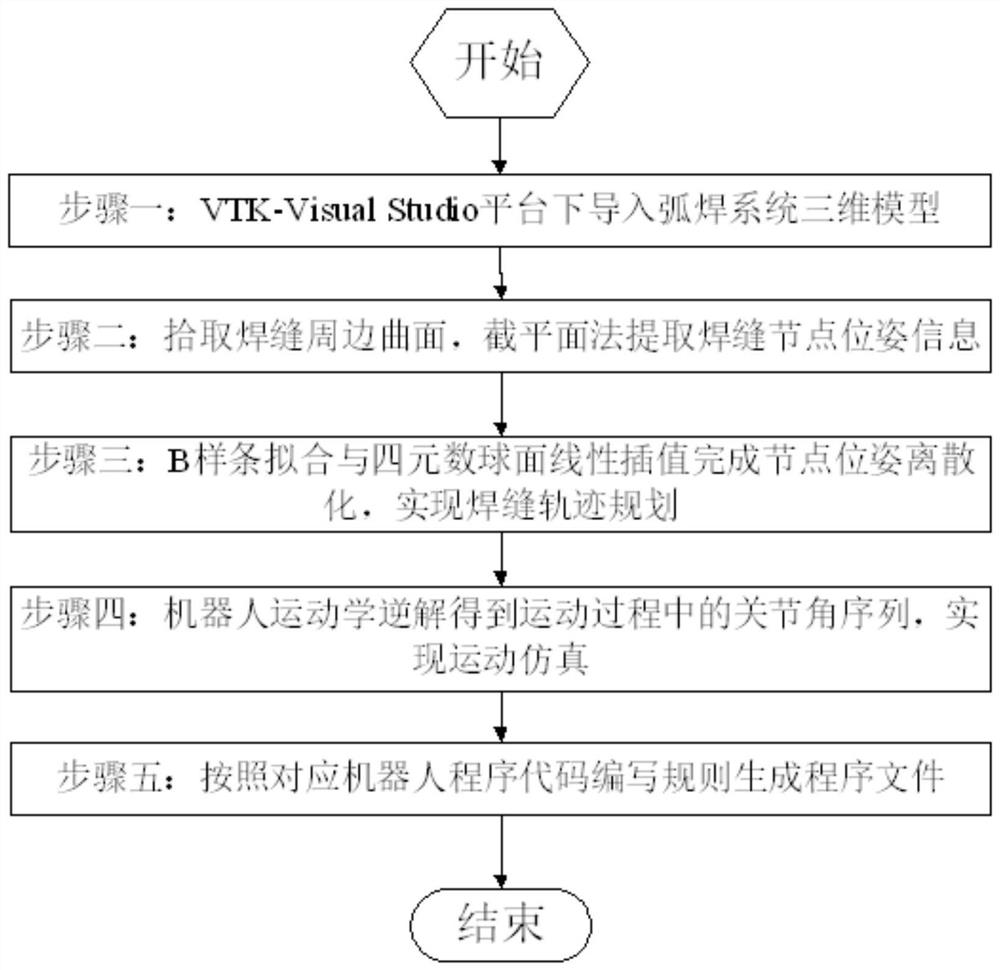
[0071] Such as figure 1 Shown is an offline programming method for spatial intersecting curve welding of industrial robots. The implementation steps are as follows:
[0072] Step 1: Import the 3D model of the arc welding system and layout it in the offline programming environment. In order to complete the layout, the workpiece is calibrated according to the actual pose relationship between the robot and the workpiece. A...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More