Mechanical arm end executor
A technology of end effectors and robotic arms, applied in the field of end effectors of robotic arms, which can solve the problems of inability to perform simultaneous rotation, grasping and positioning of circular workpieces, etc., and achieve the effect of reducing production costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] Preferred embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings, wherein the accompanying drawings constitute a part of the application and together with the embodiments of the present invention are used to explain the principle of the present invention and are not intended to limit the scope of the present invention.
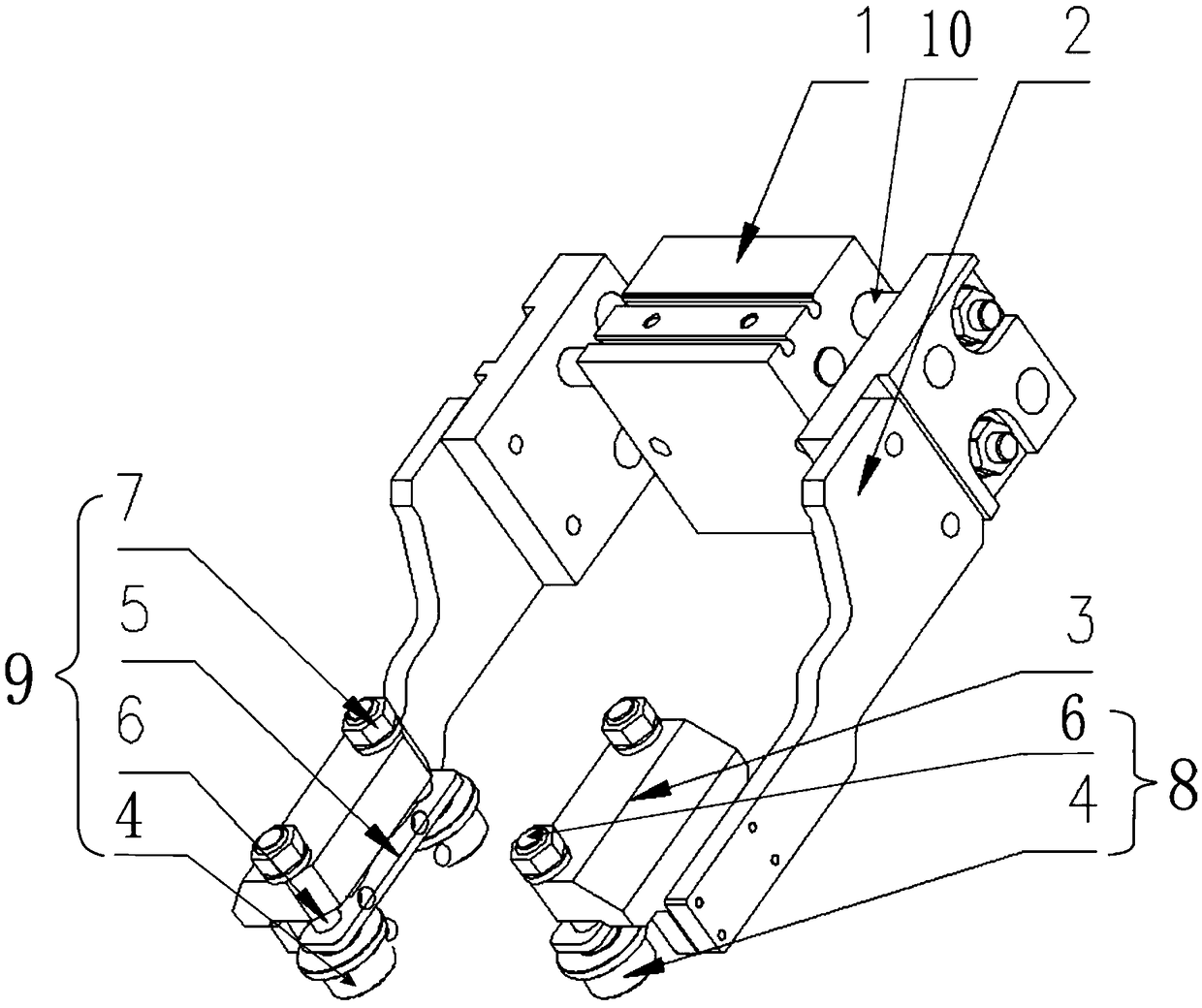
[0031] A specific embodiment of the present invention discloses a mechanical arm end effector, such as figure 1 As shown, it includes the air gripper 1 and the air gripper connecting plate 2 arranged on both sides of the air gripper 1. The end of the air gripper connecting plate 2 is provided with a roller structure 9, and the roller structure 9 is arranged symmetrically with respect to the air gripper 1; the roller structure 9 includes a roller bracket 3 and two roller assemblies 8, and the two roller assemblies 8 are arranged side by side on the roller bracket 3, and the roller assemblies 8 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More