

Inverse solution and modeling method based on shaft invariant and D-H parameters of 1R/2R/3R
A modeling method and variable technology, applied in the field of robotics, can solve the problems of cumbersome D-H parameter determination process, low repeat accuracy and low reliability of robot system absolute positioning and attitude setting accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
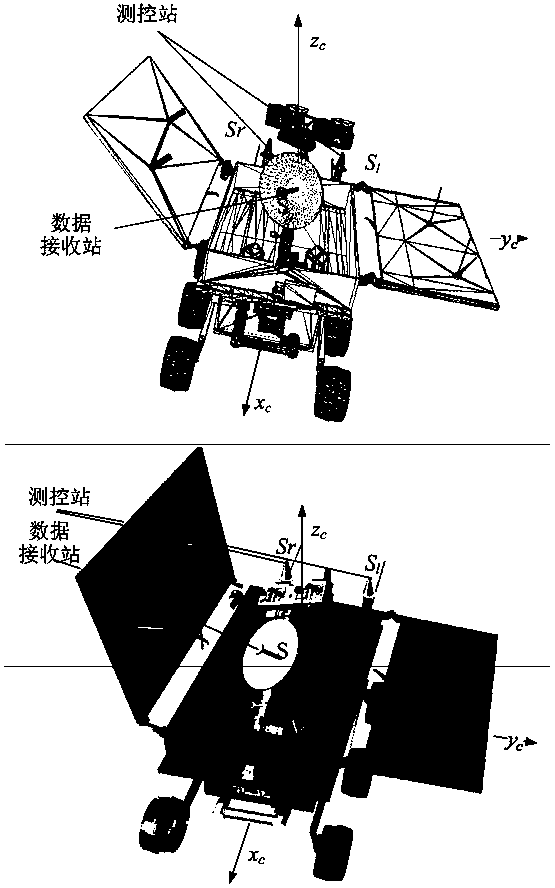
[0304] The following method is used to model and calculate the inverse solution of the attitude of the CE3 digital transmission mechanism:
[0305] Such as Image 6 As shown, the rotation chain of the digital transmission mechanism of the CE3 patrol is c l m =(c,d,m], the sequence of axis invariants is [ c no d , d no m ]. The unit vector of the ground data receiving station is c u S . Find its angle sequence [φ d ,φ m ].
[0306] The structural parameters expressed by axis invariants obtained through precise measurement are
[0307]
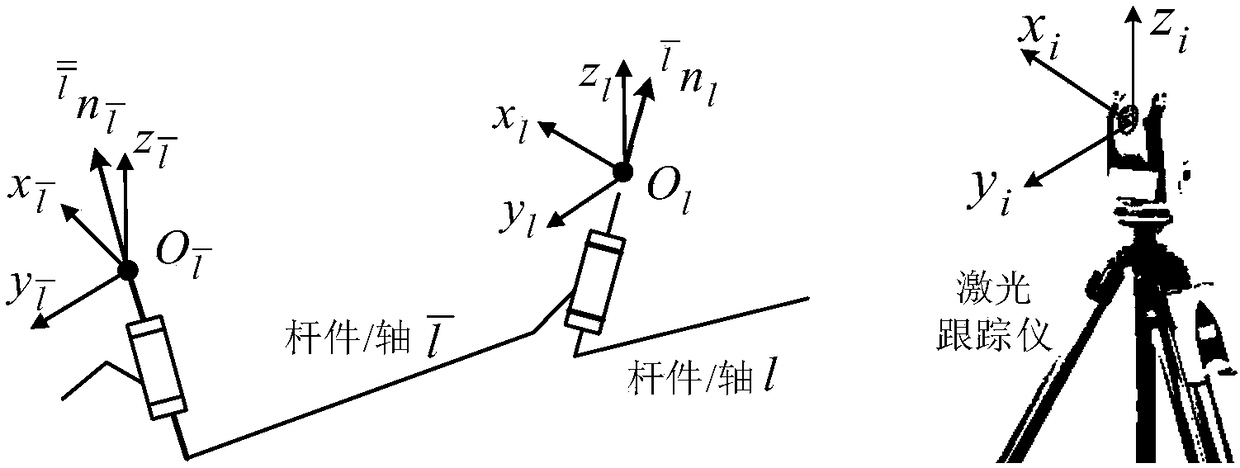
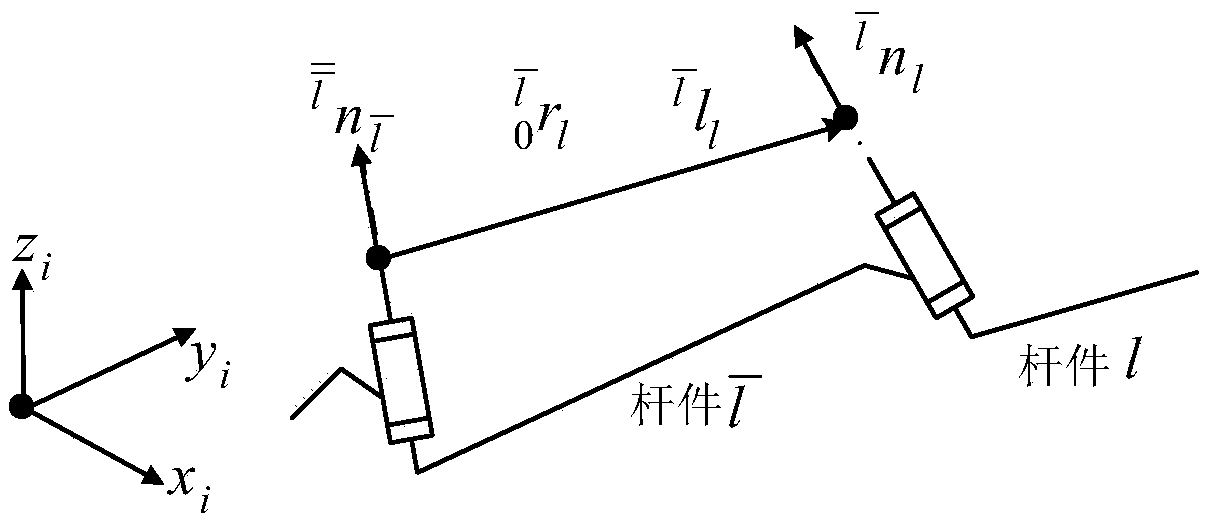
[0308] Based on the relationship between the natural coordinate system and the D-H system, F={F [l] |l∈A}, Where: F [l] is the natural coordinate system, F [l′] It is D-H series; and there are
[0309] determine the middle point And the origin O of the D-H system l′ .
[0310] make and z l′ axis-invariant with and
[0311] defined as to n l public vertical line. is the axis The unit coordinate vector...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More