Cooperative trajectory optimization method for dual robot based on parabolic interpolation algorithm
A dual-robot, trajectory optimization technology, applied in computer control, instruments, simulators, etc., can solve problems such as unstable motion, large amount of calculation, motor vibration, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0027] The technical solutions in the embodiments of the present invention will be described clearly and in detail below in conjunction with the drawings in the embodiments of the present invention. The described embodiments are only some of the embodiments of the invention.
[0028] The technical scheme that the present invention solves the problems of the technologies described above is:
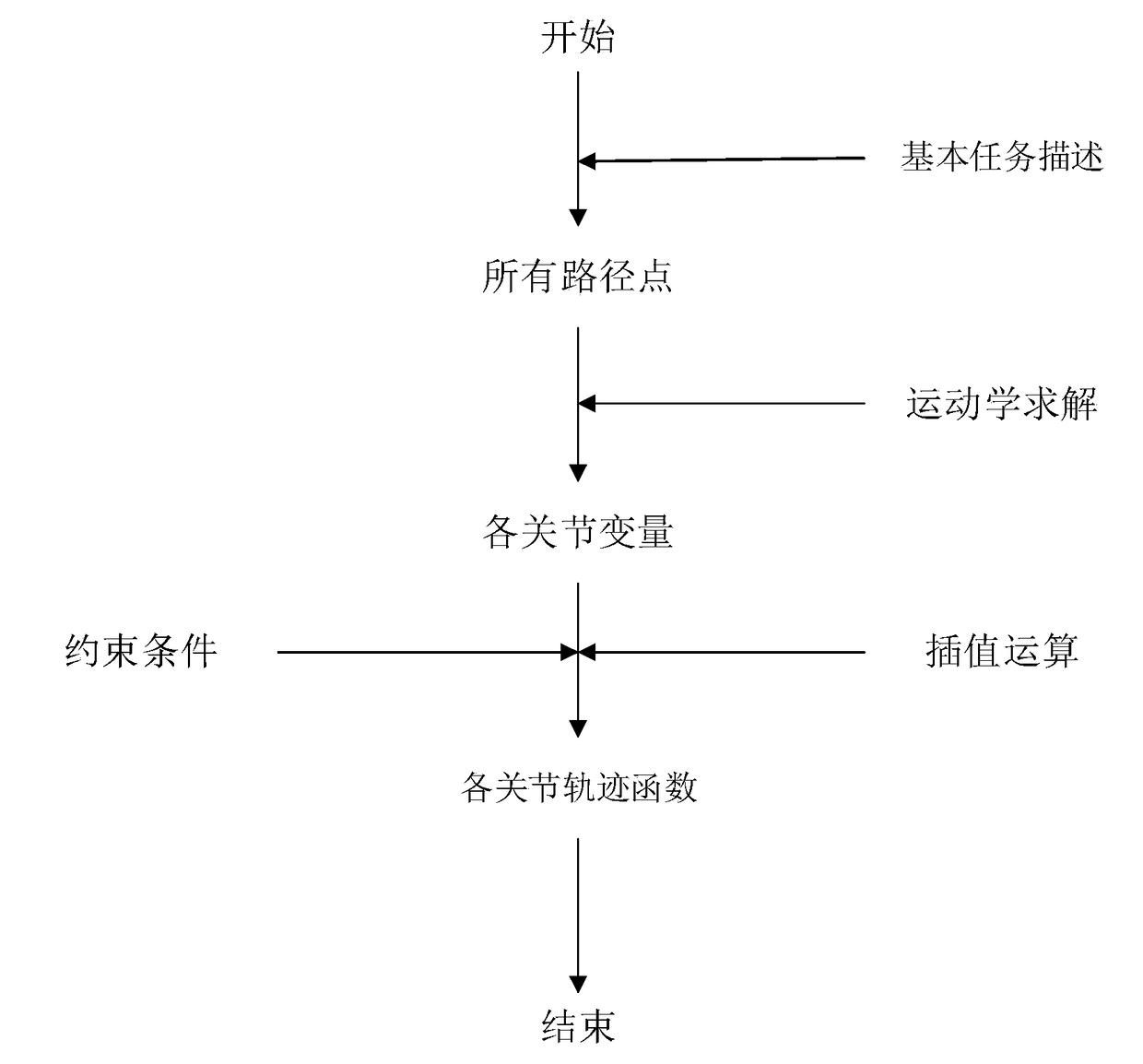
[0029] The present invention proposes a dual-robot collaborative trajectory optimization method based on a parabolic interpolation algorithm. Optimize the optimal value of the variable to obtain the optimal collaborative trajectory. When performing trajectory planning, firstly, each motion path point is transformed into a joint path point using the inverse kinematics equation, and then a smooth function is fitted through the joint path points corresponding to each joint. These joint trajectory functions indicate the movement trajectory of each joint starting from the initial position, pa...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com