

Sweeping control method of cleaning robot based on intermittent walking and chip
A technology for cleaning robots and control methods, applied in the field of cleaning control methods and chips, can solve problems such as high noise, and achieve the effect of reducing cleaning power consumption
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0013] The technical solutions in the embodiments of the present invention will be described in detail below with reference to the drawings in the embodiments of the present invention.
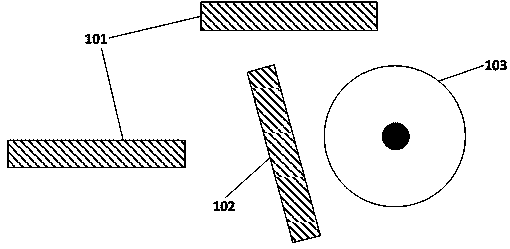
[0014] Such as figure 1 As shown, this embodiment provides a cleaning robot based on intermittent walking, and the cleaning robot is equipped with a casing 101, a main brush 103, a side brush, a vacuum cleaner, a map recording component, a garbage box and a garbage collecting baffle 102, wherein, the bottom of the casing 101 is provided with a side brush assembly port, which is located in front of the main brush 103, and the garbage collecting baffle 102 is fixedly arranged at the side brush assembly port at the bottom of the casing 101, or is fixedly arranged at the original side brush the front of the structure. Such as figure 1 As shown, the lower end of the garbage gathering baffle 102 is inclined to the main brush 103 , and the upper end of the garbage gathering baffle 102 is inclined t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More