

Object motion trajectory recognition method, device, equipment and storage medium
A technology of object motion and recognition method, applied in the field of image processing, can solve the problems of low efficiency and low accuracy in determining the actual position of the target, and achieve the effects of great practical application significance, improved determination efficiency and accuracy, and strong versatility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
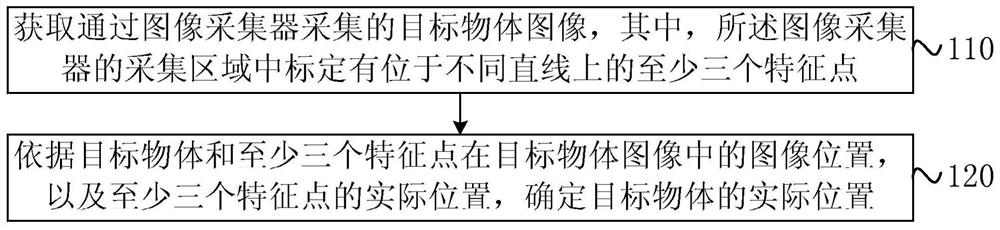
[0025] figure 1 This is a flowchart of an object motion trajectory recognition method provided in Embodiment 1 of the present invention. This embodiment is applicable to the situation of determining the actual position of a target object in an image, and the method can be executed by an object motion trajectory recognition device. The method specifically includes the following steps:
[0026] S110. Acquire an image of the target object collected by an image collector, wherein at least three feature points located on different straight lines are demarcated in a collection area of the image collector.
[0027] In a specific embodiment of the present invention, the image collector may be a surveillance camera, an industrial camera, a mobile phone, a computer, or other equipment with an image acquisition function. collection. The number of image collectors can be one or more. When images of multiple scenes need to be acquired, multiple image collectors can be installed in diff...
Embodiment 2
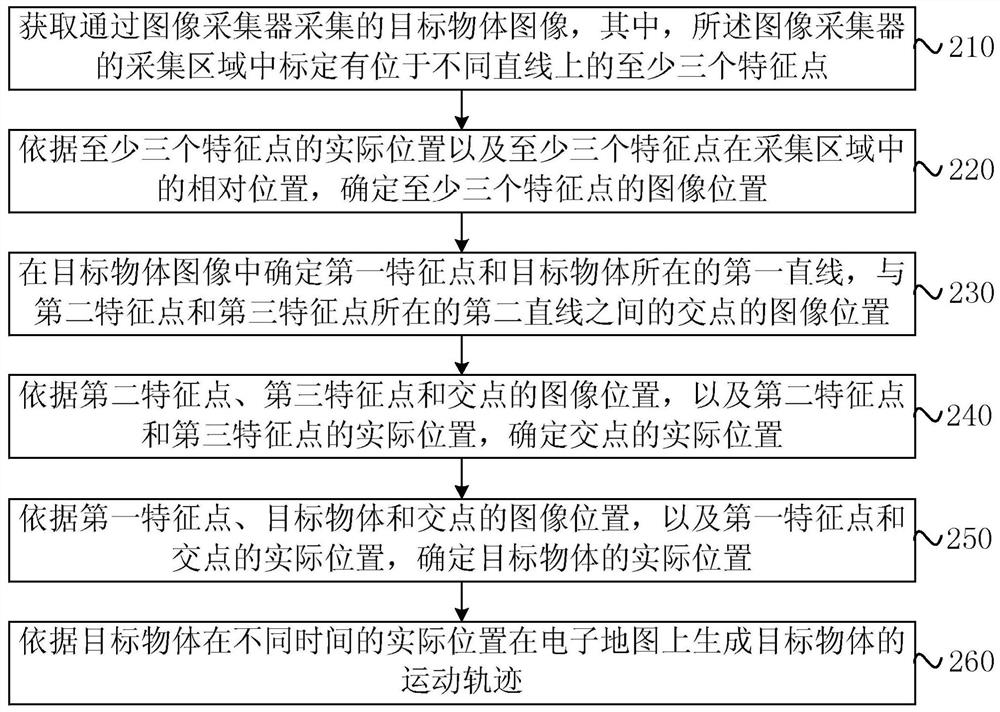
[0038] On the basis of the above-mentioned first embodiment, this embodiment provides a preferred implementation of the method for identifying the motion trajectory of an object, which can generate the motion trajectory of the target object on the electronic map. figure 2 A flow chart of a method for recognizing a motion trajectory of an object provided in Embodiment 2 of the present invention, such as figure 2 As shown, the method includes the following specific steps:
[0039] S210. Acquire an image of the target object collected by an image collector, wherein at least three feature points located on different straight lines are demarcated in a collection area of the image collector.
[0040] In a specific embodiment of the present invention, the collection area of the image collector is the actual scene area targeted by the image collector when capturing images, and at least three feature points located on different straight lines are pre-calibrated in the collection ...
Embodiment 3
[0060] Figure 4 This is a schematic structural diagram of an object motion trajectory recognition device provided in Embodiment 3 of the present invention. This embodiment can be applied to the situation of determining the actual position of a target object in an image, and the device can realize the object motion trajectory described in any embodiment of the present invention. recognition methods. The device specifically includes:
[0061] An image acquisition module 410, configured to acquire an image of the target object collected by an image collector, wherein at least three feature points located on different straight lines are demarcated in the collection area of the image collector;
[0062] The actual position determination module 420 is configured to determine the actual position of the target object according to the image positions of the target object and the at least three feature points in the image of the target object, and the actual positions of the at leas...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More