

Redundant mechanical gripper system for automatic production line and working method thereof
A working method and the technology of mechanical claws, applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as shutdown of unmanned factories and achieve the effect of improving production efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
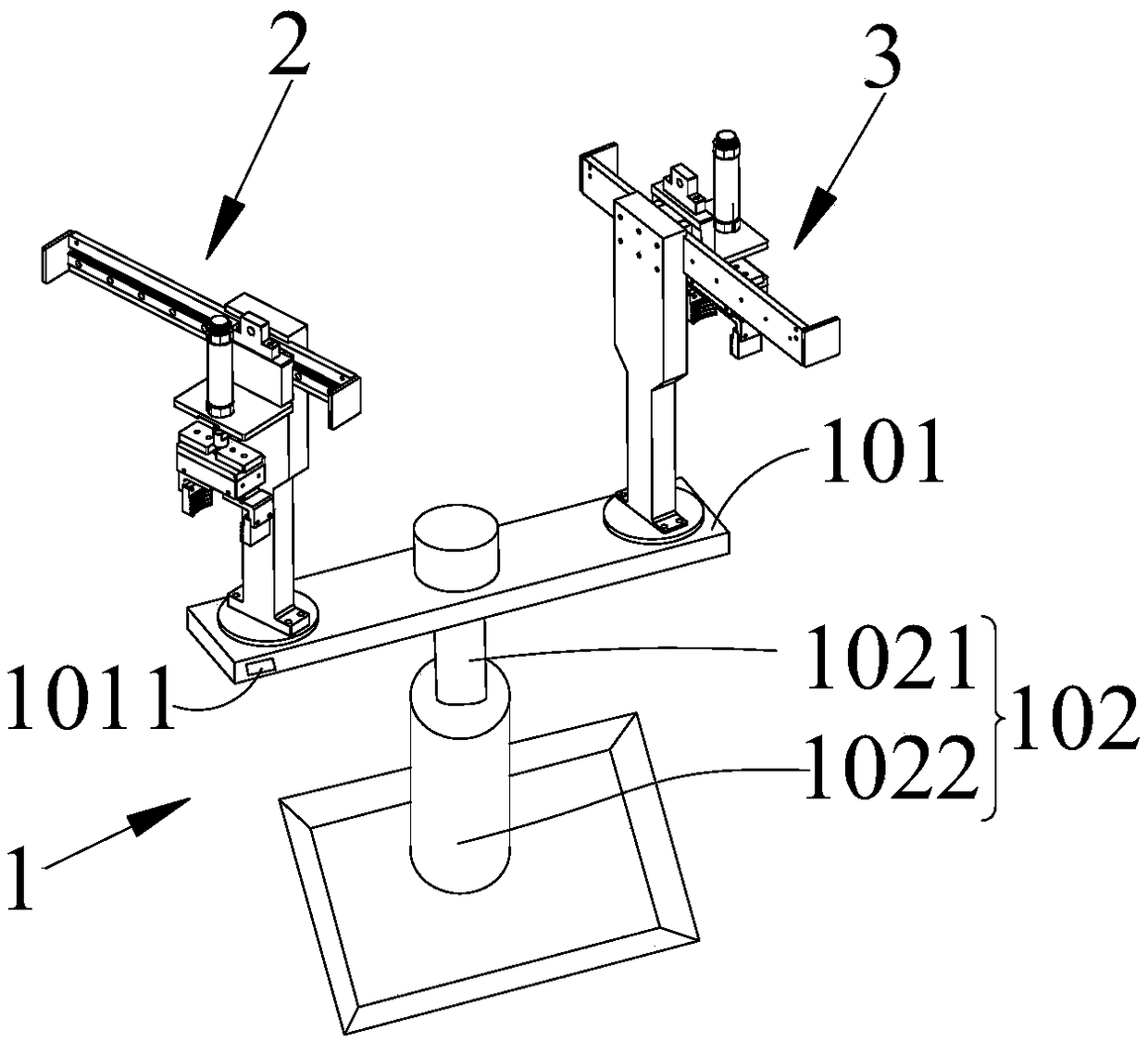
[0023] figure 1 It is a structural diagram of the redundant mechanical claw system of the present invention;
[0024] Such as figure 1 As shown, the present invention provides a redundant mechanical gripper system, a main manipulator 2 and a secondary manipulator 3 rotated by a rotating device 1, and a detection device for detecting the working state of the main manipulator; wherein the rotating device and the detection device are both It is electrically connected with the main control module; after judging that the main manipulator is faulty, the main control module is suitable for controlling the rotation of the rotating device 1, that is, the auxiliary manipulator 2 is rotated to the working position of the main manipulator 3 to work instead of the main manipulator 2; by rotating The device 1 rotates the auxiliary manipulator 3 to the working position of the main manipulator 2 to realize the normal production of the unmanned factory when the main manipulator 2 fails.
[0...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More