

Real-time trajectory planning method for autonomous vehicle
A trajectory planning and automatic driving technology, applied in the direction of motor vehicles, vehicle position/route/height control, non-electric variable control, etc., can solve problems such as high complexity and fuzzy membership function design
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0064] In the drawings, the same or similar reference numerals are used to denote the same or similar elements or elements having the same or similar functions. Embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings.
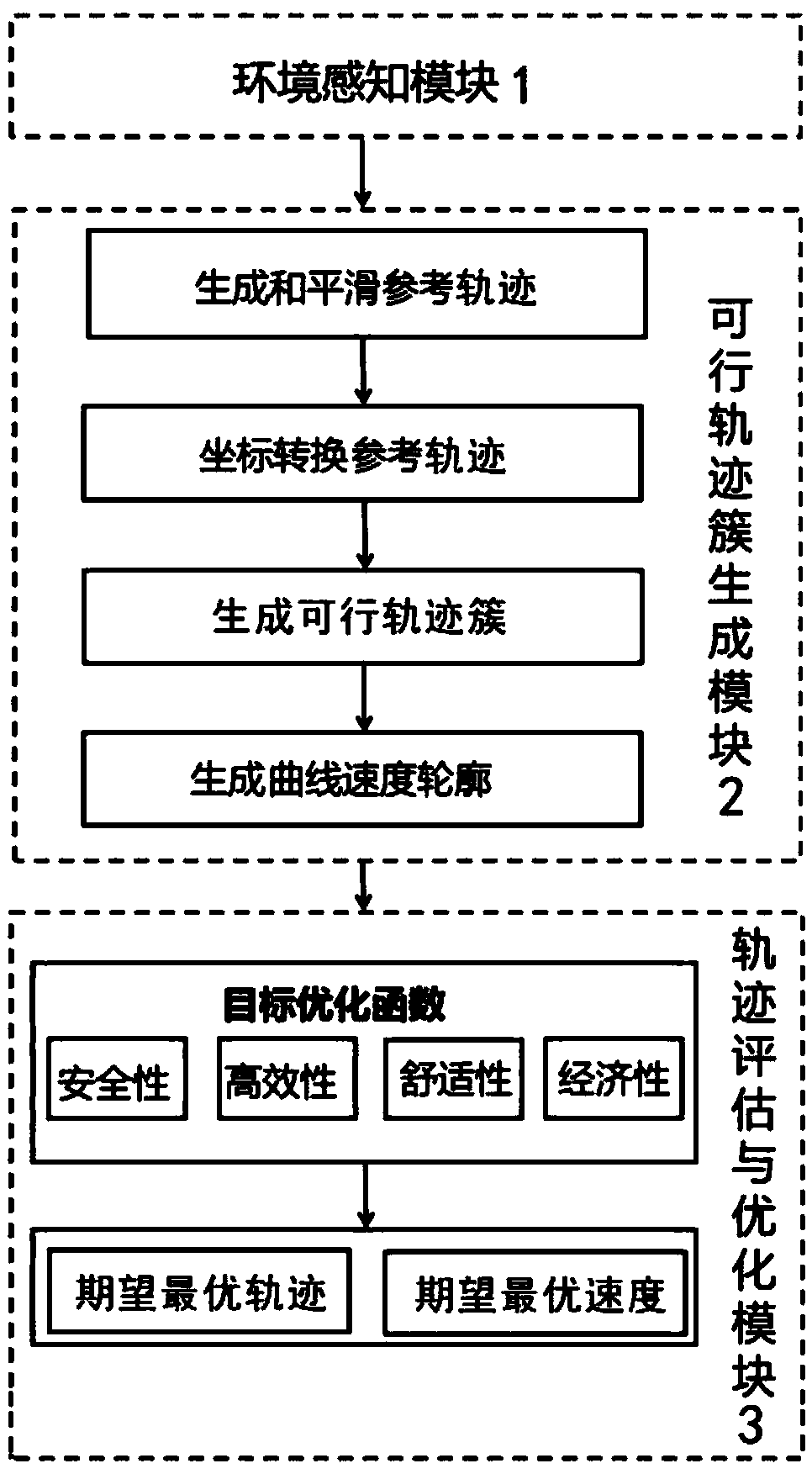
[0065] like figure 1 As shown, the real-time trajectory planning method for an automatic driving vehicle provided in this embodiment includes the following steps:
[0066] S1. Obtain relevant information about the vehicle and its surrounding environment in real time. The relevant information of the own vehicle and the surrounding environment is acquired by the environment perception module 1 in real time. The relevant information of the self-vehicle and its surrounding environment specifically includes environment perception information, vehicle position and navigation information. The environmental perception information mainly includes obstacle information, road environment information, and lane ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More