Point cloud registration method from point to optimum plane in data acquisition of ground laser scanner
A laser scanner and data acquisition technology, applied in image data processing, instruments, image analysis, etc., can solve problems such as slow convergence rate, and achieve the effect of improving registration accuracy, fewer iterations, and accurate conversion parameters
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] In order to facilitate those of ordinary skill in the art to understand and implement the present invention, each step of the method proposed by the present invention is described in detail below, and the experimental process is given. It should be understood that the implementation examples described here are only used to illustrate and explain the present invention, and It is not intended to limit the invention.
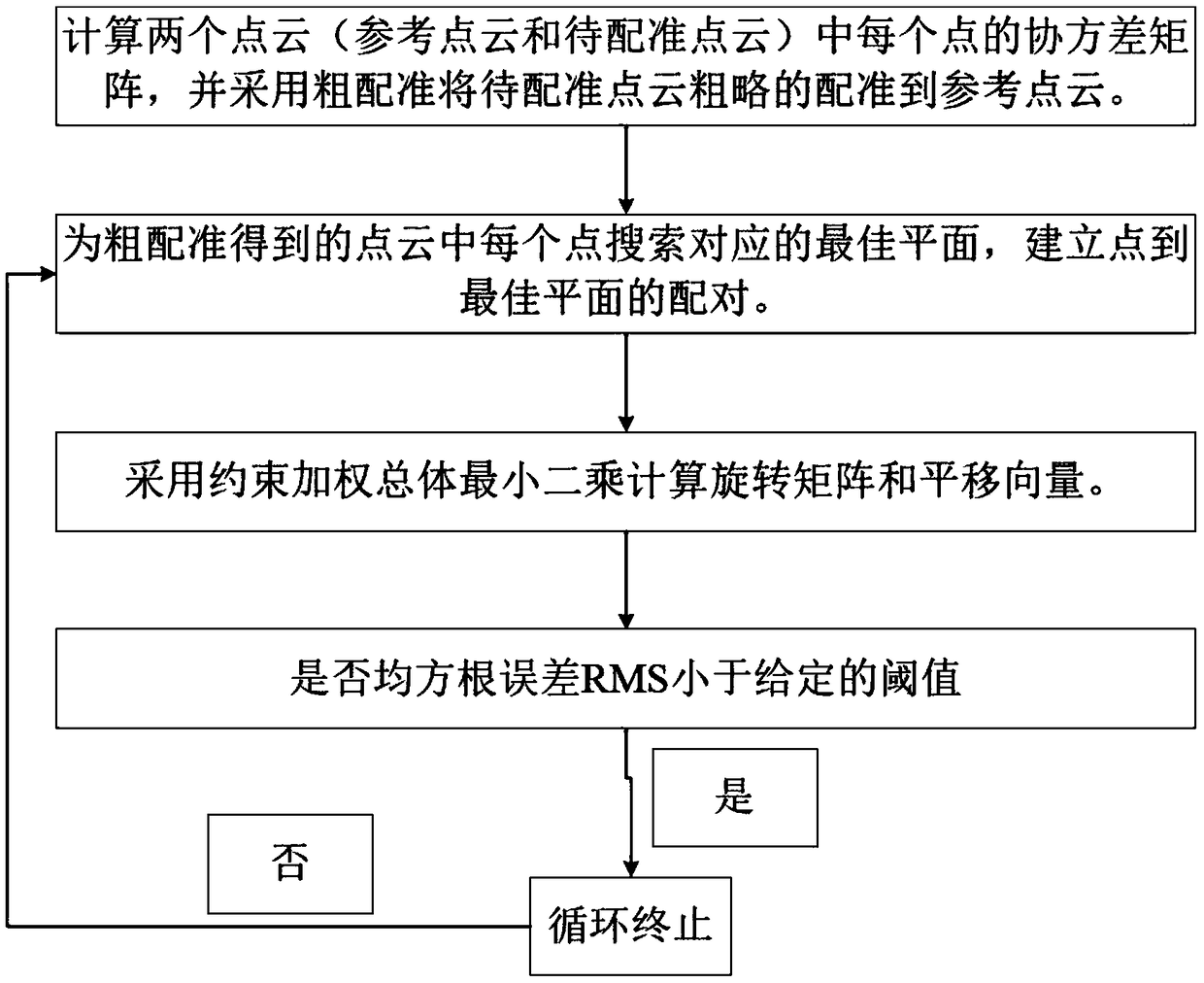
[0025] please see figure 1 , a point cloud registration method from the middle point of ground laser scanner data collection to the best plane provided by the present invention, assuming that there are two point clouds P 1 and P 2 , with P 1 As a reference point cloud, P 2 As the point cloud to be registered, P 2 Register to P 1 ; and assuming that coarse registration has been implemented, the point cloud is obtained which is where R C is the rotation matrix obtained by rough registration, t C is the translation vector obtained by rough registrat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More