

Robot for deep-sea polymetallic nodule collection and collection method
一种多金属结核、机器人的技术,应用在机械驱动的挖掘机/疏浚机、开采矿物、土方钻采等方向,能够解决无法适应深海地形和环境、效率低、成本高等问题,达到有利于可持续发展、提高采集效率、减轻自重的效果
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] Hereinafter, the present invention will be illustrated with examples in conjunction with the drawings.
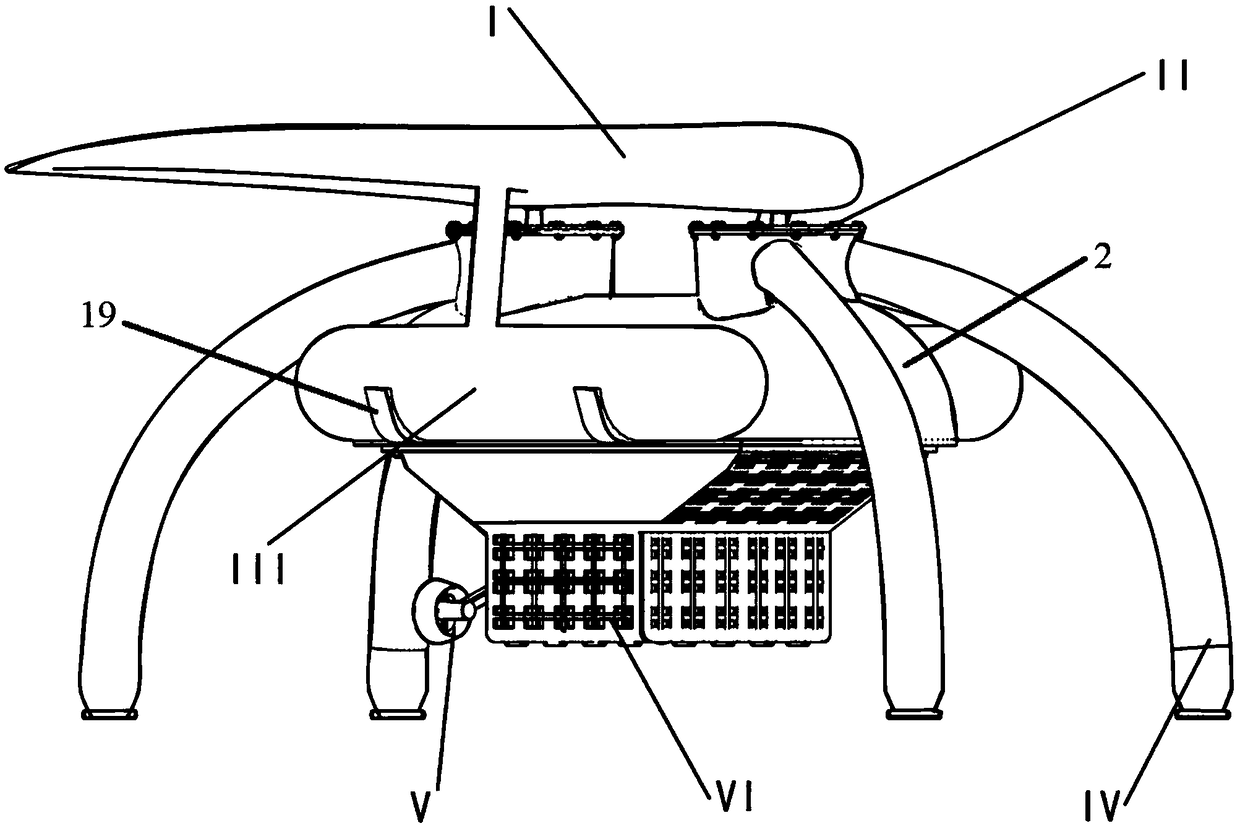
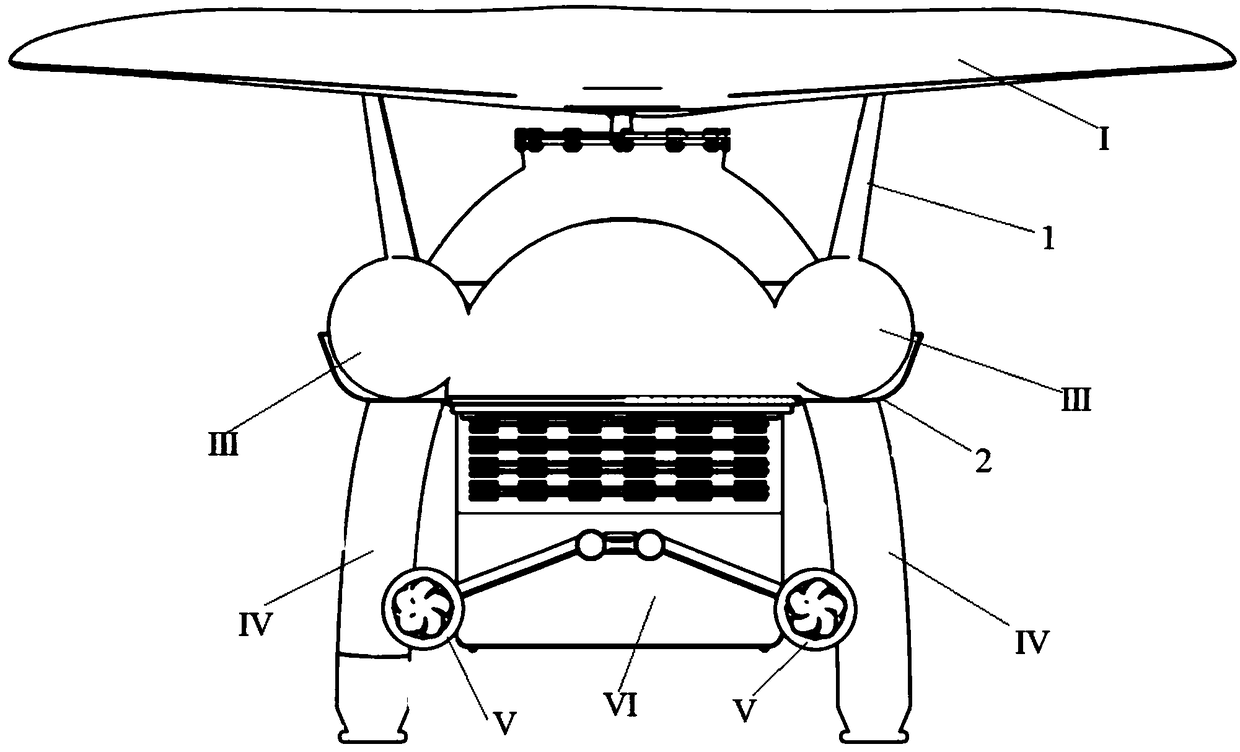
[0034] As shown in the figure, a robot for collecting deep-sea polymetallic nodules includes a frame 2, a wing-shaped floating cabin I, a compressed air cabin III, a collection tube IV, a collection pump II, a collection frame VI and a propeller V.
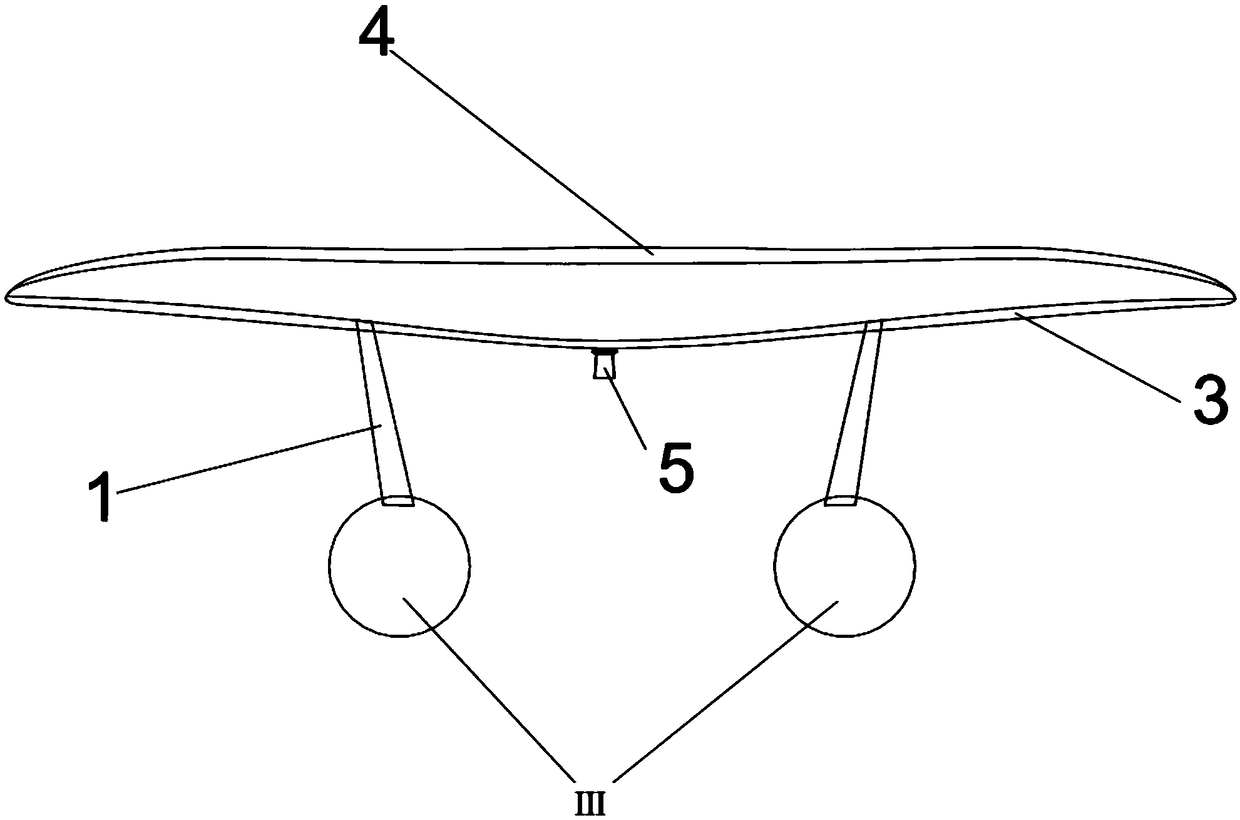
[0035] The airfoil pontoon I imitates the shape and structure of a wing and is arranged on the top of the robot. The airfoil pontoon I includes a water outlet 3 on the lower side of the tail of the device, an exhaust port 4 on the upper side of the tail of the device, a connecting pipe 1 connected with the airfoil pontoon I, and two lower fixing devices 5 at the front and back. The connecting pipes 1 are located on both sides of the wing-shaped floating cabin I, respectively connected to the compressed air cabins III on both sides; the fixing devices 5 are located at the front and rear ends of the wing-shaped floating cabin I...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More