Porous minimally-invasive robot system based on flexible operation arms and using method thereof
A robotic system and surgical arm technology, which is applied in the field of medical devices, can solve the problems of manual multi-hole minimally invasive surgery and the fatigue of doctors during operation, and achieve the effect of alleviating physical burden and solving difficult operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0057] Embodiment 1 provides a porous minimally invasive robotic system based on a flexible surgical arm, and the structure of the porous minimally invasive robotic system based on a flexible surgical arm will be described in detail below.
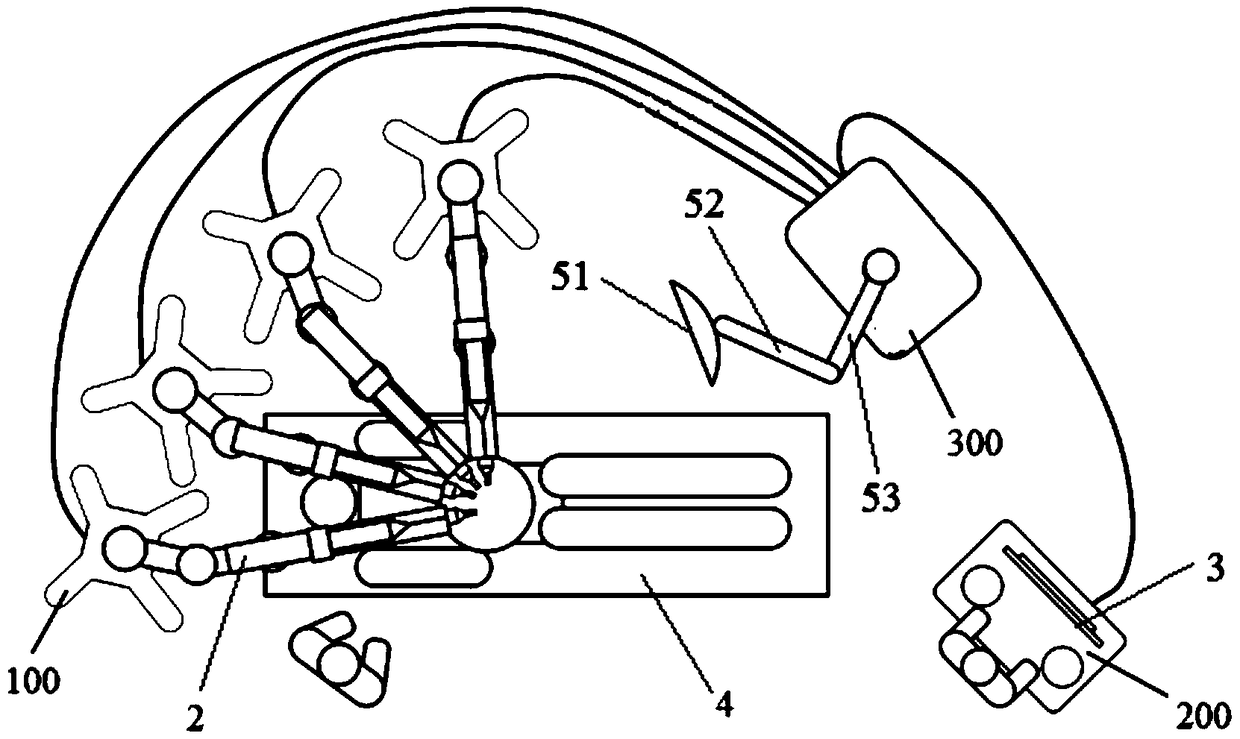
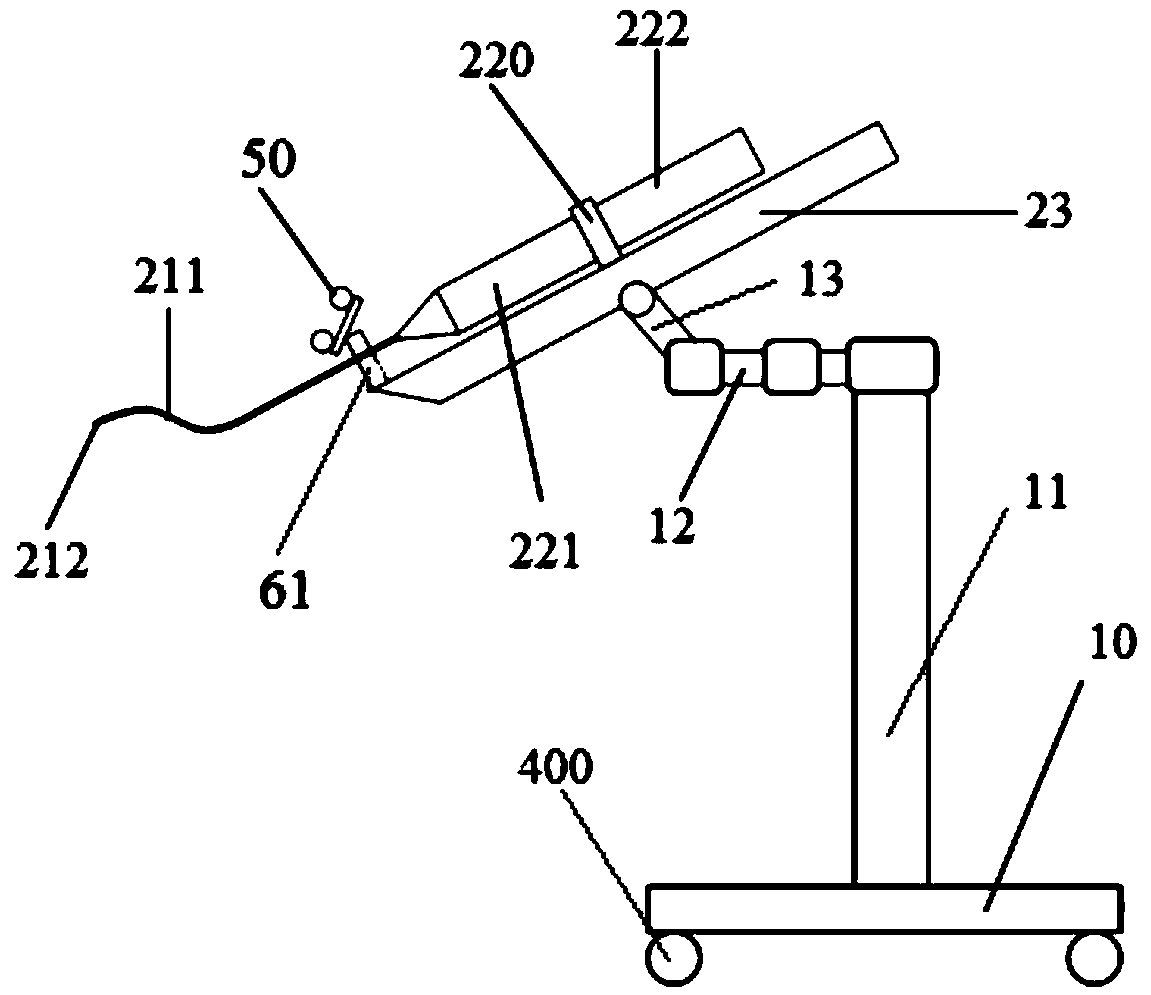
[0058] refer to figure 1 , the porous minimally invasive surgery system based on the flexible operating arm includes three or four operating trolleys 100, a main control trolley 200, an equipment trolley 300 and an operating bed 4, and three or four operating trolleys 100 are arranged on the operating bed 4 Around, the main control trolley 200 and the operating trolley 100 are connected through a signal transmission cable, and the equipment trolley 300 is connected through a power transmission cable. Wherein, the operating bed 4 is used for lying patients, and three or four operating trolleys 100 are arranged around the operating bed 4 . Each operating trolley 100 is provided with a flexible operating arm 2, and the operating trolley 100 ...
Embodiment 2
[0082] This embodiment 2 provides a method for using the porous minimally invasive robotic system based on the flexible surgical arm. The porous minimally invasive robotic system based on the flexible surgical arm of embodiment 1 is used. The using method includes the following steps:
[0083] Step S1: Set up the main control trolley 200, the equipment trolley 300, the operating bed 4 and several operating trolleys 100, the several operating trolleys 100 are set around the operating bed 4, the main control trolley 200 and the operating trolley 100 Connected by a signal transmission cable, and the equipment trolley 300 is connected by a power transmission cable;
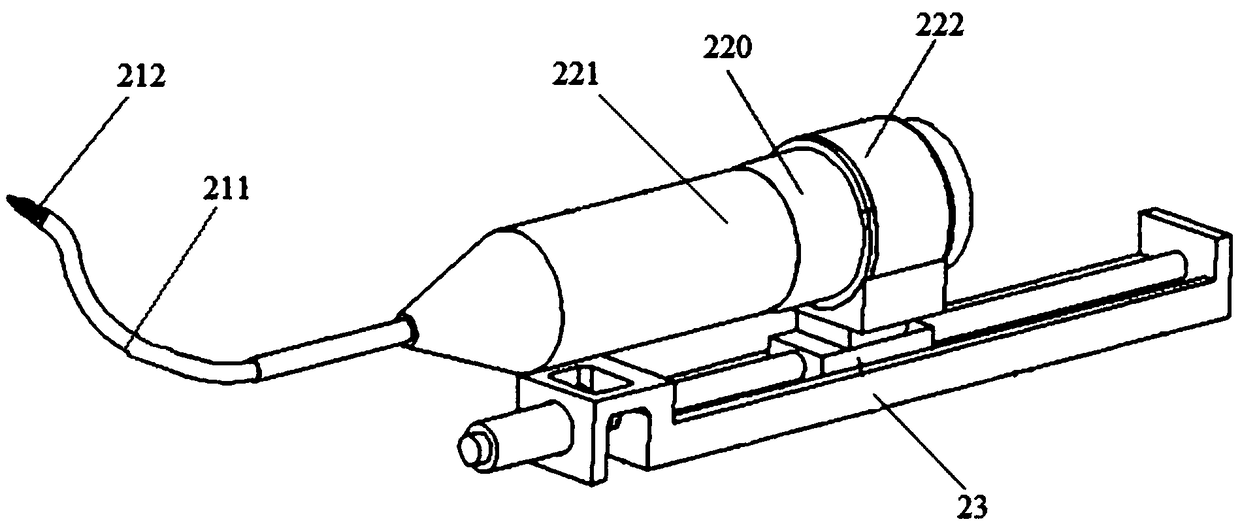
[0084] Step S2: Arranging the distal structure, the middle connecting body and the proximal structure sequentially from the distal end to the proximal end to form a flexible continuum structure 211, wherein the distal flexible arm body includes a first distal segment and a second distal end Structural segment, the sec...
Embodiment 3
[0101] This embodiment 3 provides a method of using a porous minimally invasive robotic system based on a flexible surgical arm. On the basis of the method of use provided in embodiment 2, the following step 6 is added between step 5 and step 7:
[0102] The positioning tracker 50 is set on the operating trolley 100, and the spatial positioning sensor 51 is set on the equipment trolley 300. The spatial positioning sensor 51 is first connected to the hub through a signal transmission cable, and then connected to the industrial computer 1 through the hub;
[0103] A stereo vision camera is set on the spatial positioning sensor 51; the equipment trolley 300 photographs the positioning tracker 50 on the operating trolley 100 through the stereo vision camera of the spatial positioning sensor 51;
[0104] The spatial positioning sensor 51 first connects the video information to the hub through the signal transmission cable, and then connects to the industrial computer 1 through the h...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap