A Dynamic Obstacle Avoidance Method Based on Sensor Fusion and Improved q-Learning Algorithm
A technology of dynamic obstacle avoidance and learning algorithm, applied in instruments, surveying and mapping and navigation, navigation calculation tools, etc., can solve the problem of small amount of calculation and real-time performance, and achieve the effect of improving the efficiency of obstacle avoidance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0046] The technical solutions in the embodiments of the present invention will be described clearly and in detail below with reference to the drawings in the embodiments of the present invention. The described embodiments are only some of the embodiments of the invention.
[0047] The technical scheme that the present invention solves the problems of the technologies described above is:
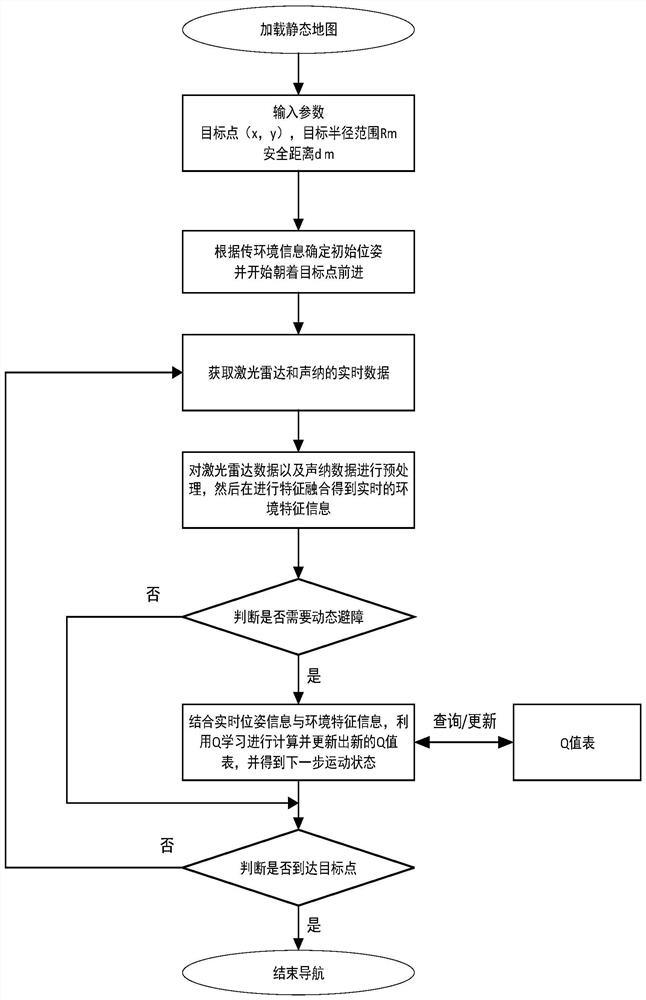
[0048] like image 3 As shown, the dynamic obstacle avoidance method of mobile robot based on sensor fusion and Q learning algorithm, the method includes the following steps:
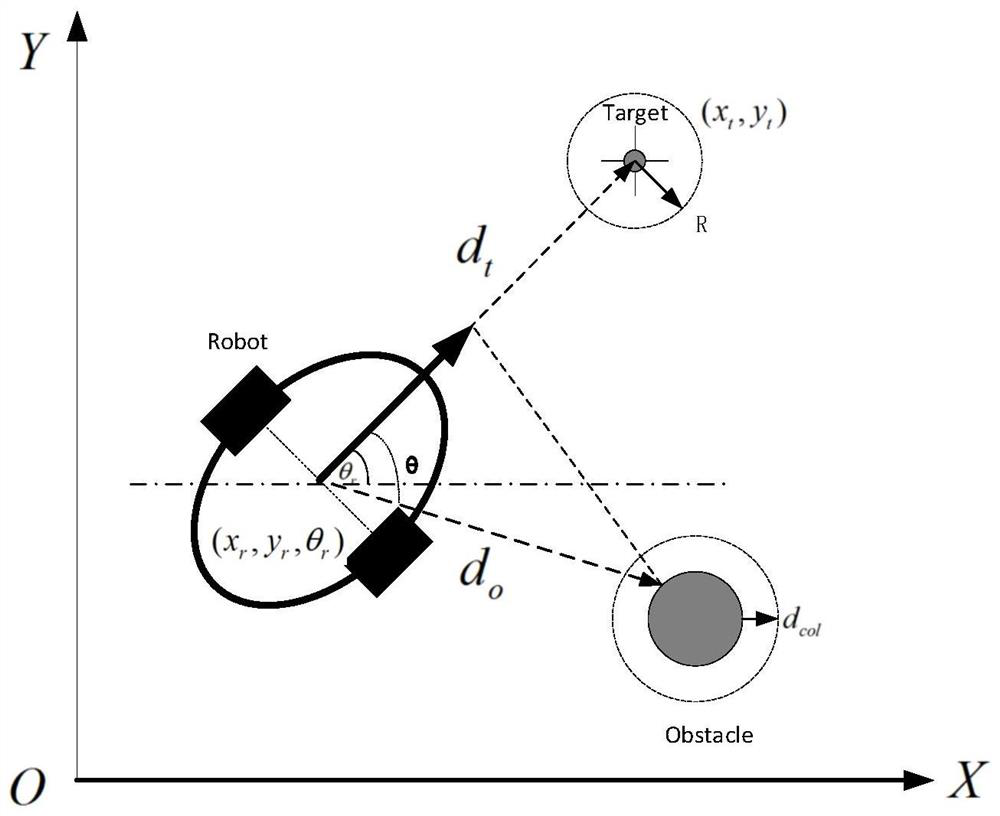
[0049] S1: Set the safety distance dm between the robot and the obstacle, and the target coordinate position information (x t ,y t ) and range Rm;
[0050] S2: Determine the current pose of the robot (x r ,y r ,θ r ), and combine the static map information with the target point (x t ,y t ) carry out navigation path planning, and start to move forward;
[0051] S3: During the navigation process, the environme...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More