

Ball Picking Robot
A robot and ball storage technology, applied in the direction of balls, sports accessories, etc., can solve the problems of the ball slipping, the weight of the ball object should not be too large, and it is unstable.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The present invention will be described in further detail below in conjunction with the accompanying drawings and embodiments.
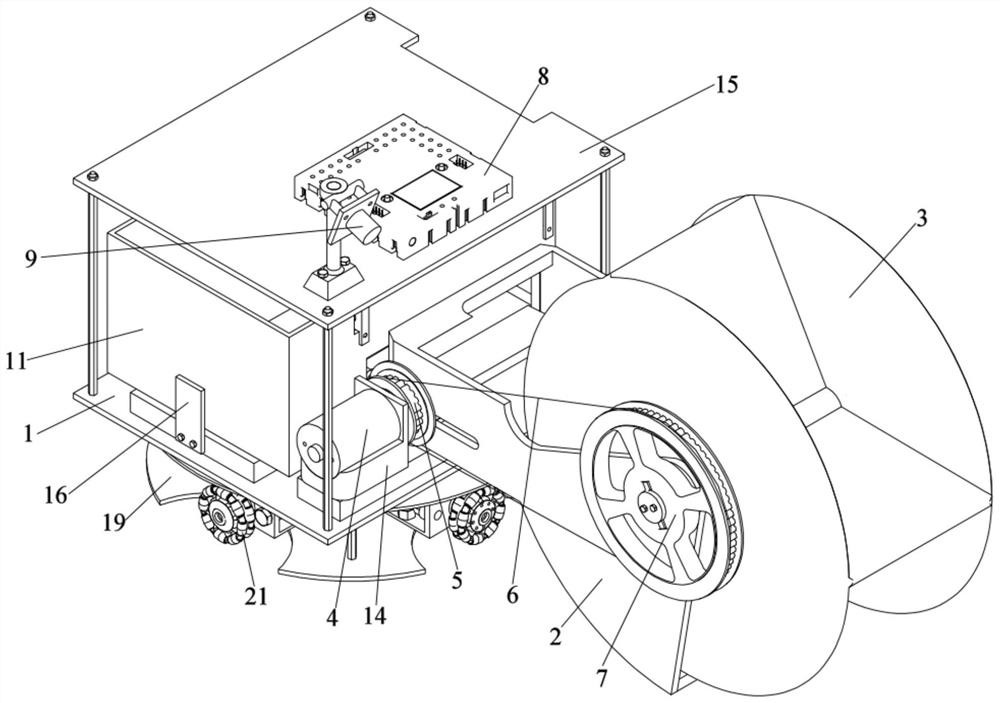
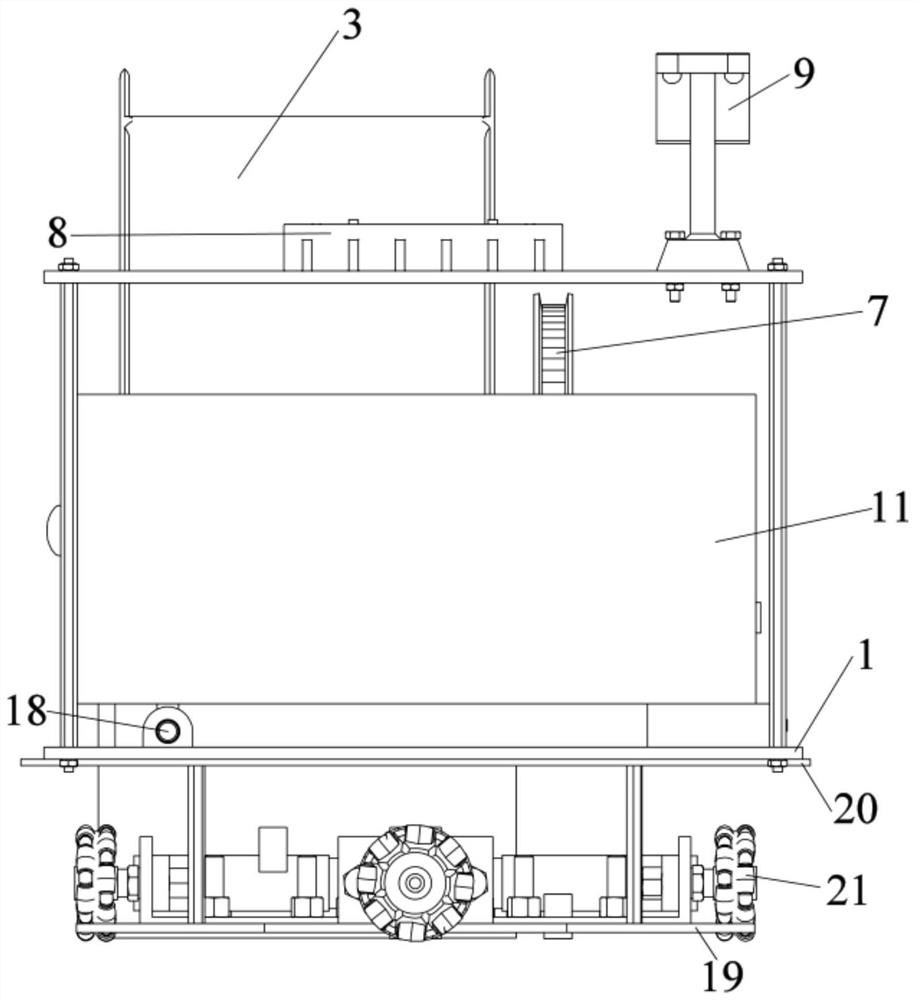
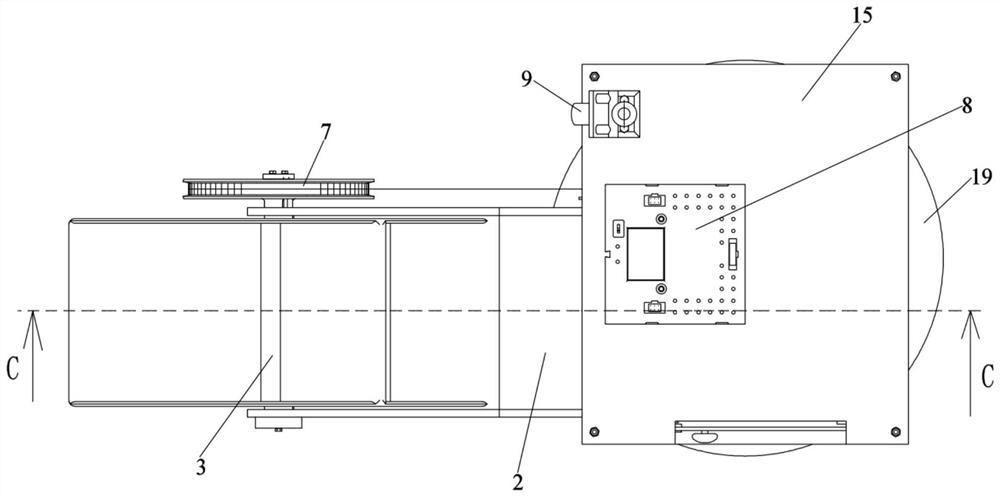
[0030] The ball picking robot of the present invention comprises a chassis 1, a drum base 2, a drum 3, a motor 4, a first synchronous pulley 5, a belt 6, a second synchronous pulley 7, a single-chip microcomputer 8, a video camera 9, an omnidirectional wheel platform, a storage Ball box 11, crank 24, slide block 10 and guide rail 12. Structure diagram such as Figure 1~4 shown. Chassis 1 is installed on the omnidirectional wheel platform. Guide rail 12, storage ball box 11 and drum seat 2 are all installed on the chassis 1. The ball storage box 11 is provided with a goal opening 11.2 and a box door 11.1, and the box door 11.1 is used to take out the ball in the ball storage box 11. The motor 4 is connected to the first synchronous pulley 5, the first synchronous pulley 5 is connected to the second synchronous pulley 7 through the belt 6, t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More