

Amphibious miniature quadruped robot steering control method
A quadruped robot and steering control technology, applied in the field of robotics, can solve the problems of increasing robot weight, reducing concealment, poor compliance, etc., and achieve the effects of improving energy utilization, stable and reliable steering, and high steering efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0073] The present invention will be described in detail below in conjunction with the accompanying drawings.
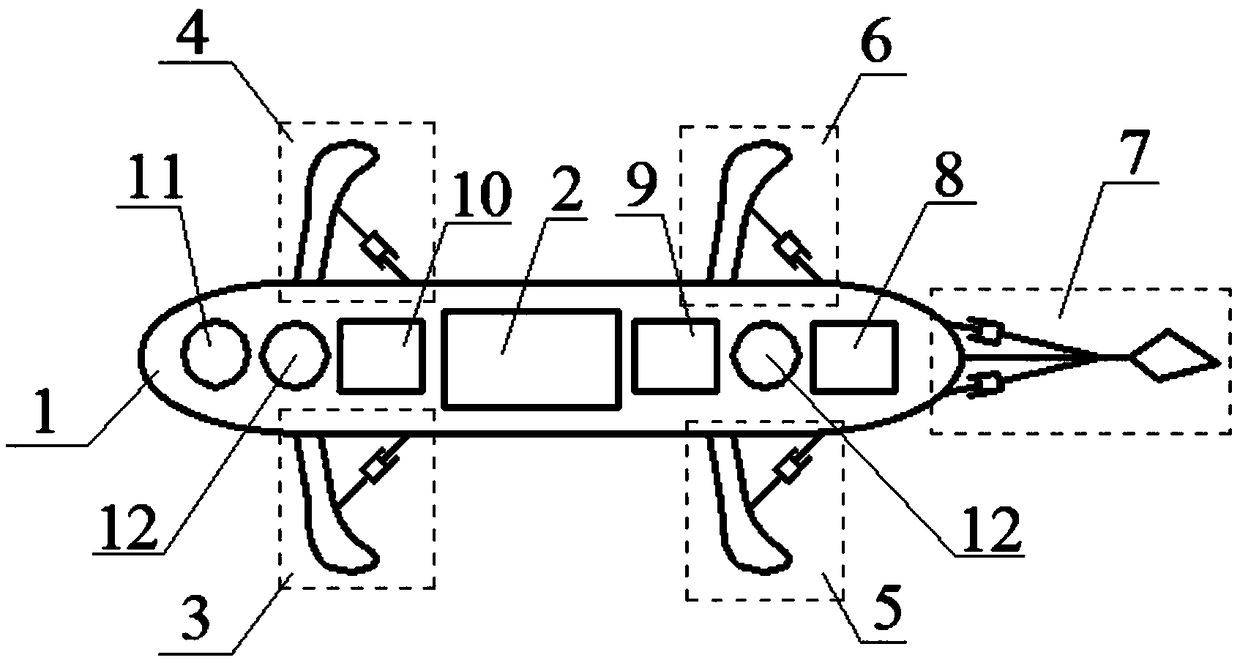
[0074] A steering control method for an amphibious miniature quadruped robot, comprising a front foot steering control method, a rear foot steering control method, a cooperative steering control method, a tail static steering control method, a tail swing steering control method and a comprehensive steering control method.
[0075] The control process of the described forefoot steering control method is as follows:
[0076] (1) Open the communication sensor module 11, receive the control signal from the control center, and input the control signal to the control module 10;
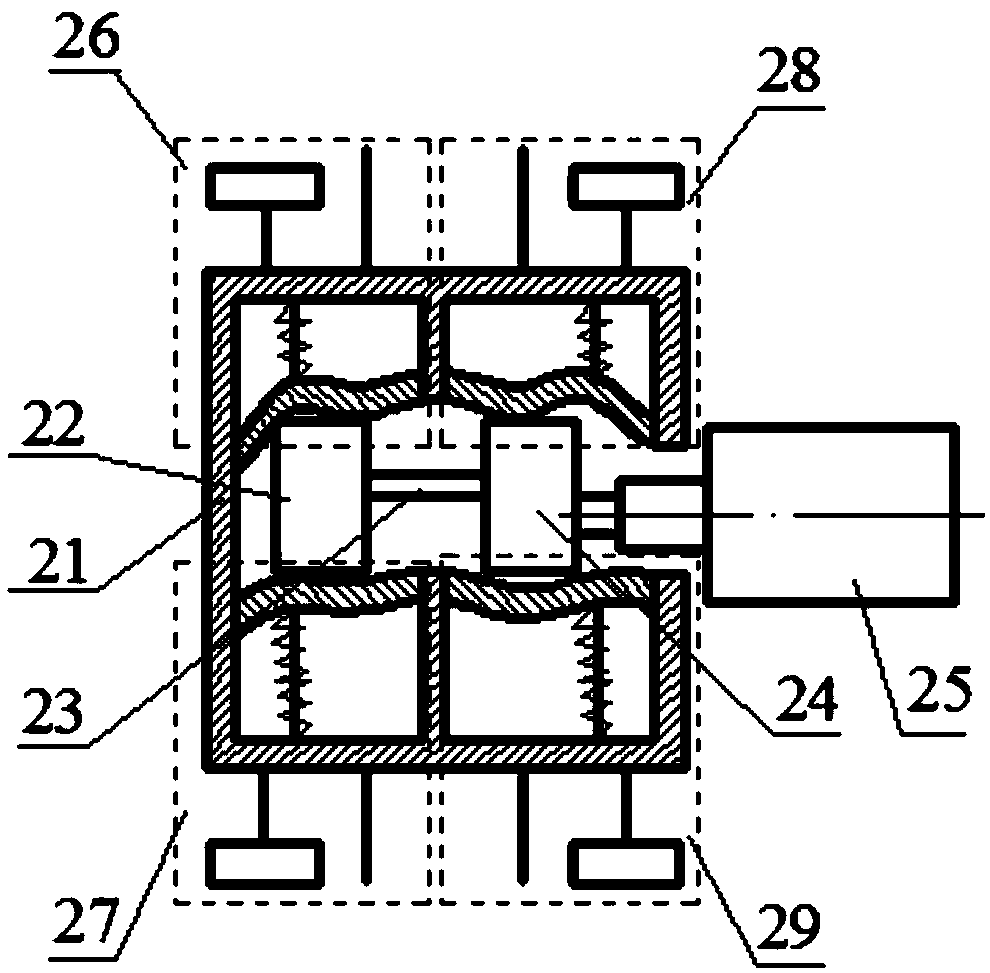
[0077] (2) The control module 10 starts to work, and controls the control valve 214 in the drive unit A26 and the drive unit B27 by the control signal, and utilizes electromagnetic force to change the opening size of the control valve 214;
[0078](3) According to the control requirements of the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More