

Collision avoidance method of narrow channel ship based on path planning and tracking control
A path planning and tracking control technology, applied in vehicle position/route/height control, non-electric variable control, control/adjustment system, etc., can solve problems affecting shooting effects, collision accidents, planning, etc., and achieve flexible shooting angles change effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
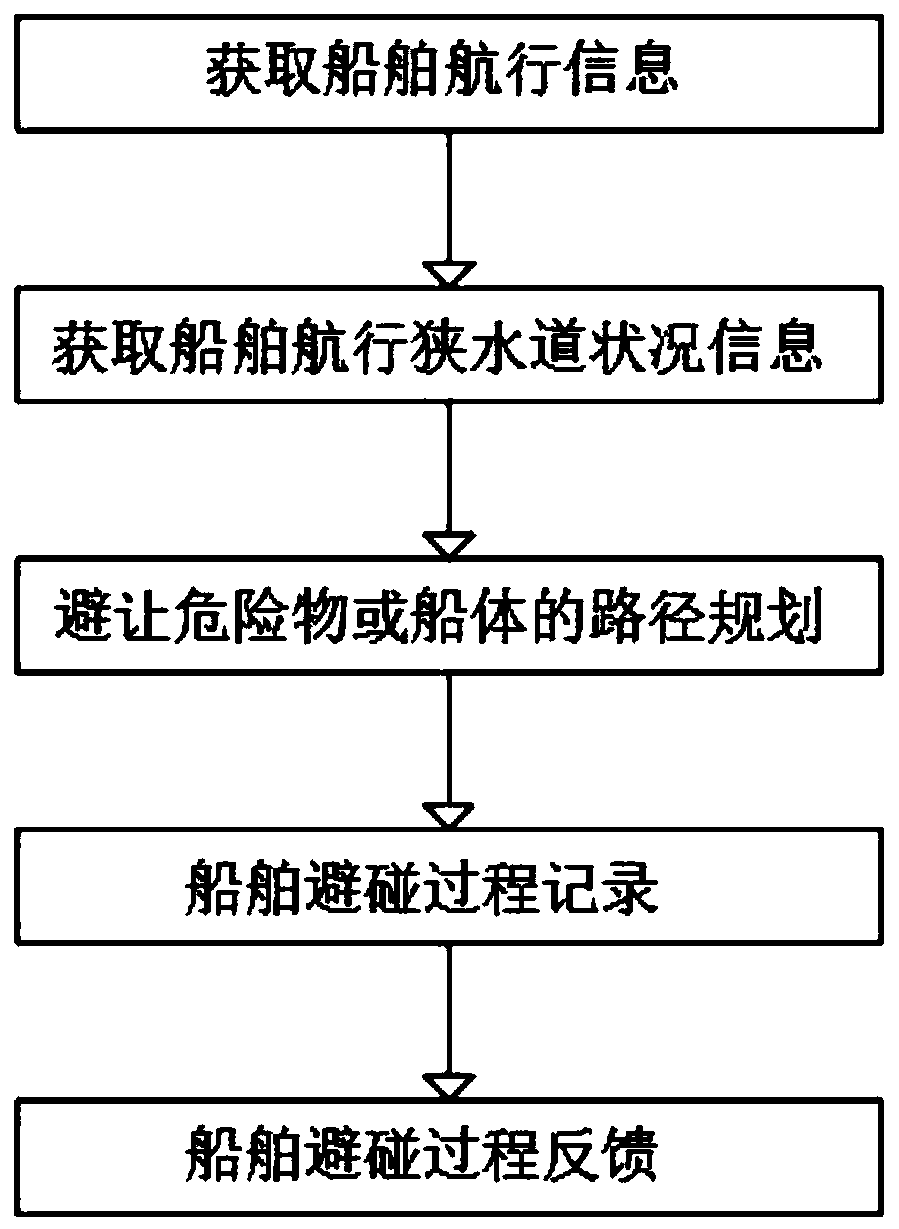
[0037] Such as figure 1 As shown, the method for ship collision avoidance in narrow waterways of the path planning tracking control of the present invention includes obtaining ship navigation information—obtaining ship navigation narrow waterway status information—path planning for collision avoidance hazards or hulls—ship collision avoidance process records—ship avoidance The method and steps of the touch process feedback, the specific steps are as follows:
[0038](1) Obtain ship navigation information: Cooperate with AIS system, obtain ship's actual position, ship speed, course, draft and ship scale and other information through GPS module, obtain ship's acceleration through acceleration sensor, and transmit the information to the main control module;
[0039] (2) Obtain information on the condition of the narrow waterway where the ship sails: Obtain the environmental conditions around the ship through the GIS module and transmit it to the cloud server. The main control mod...
Embodiment 2
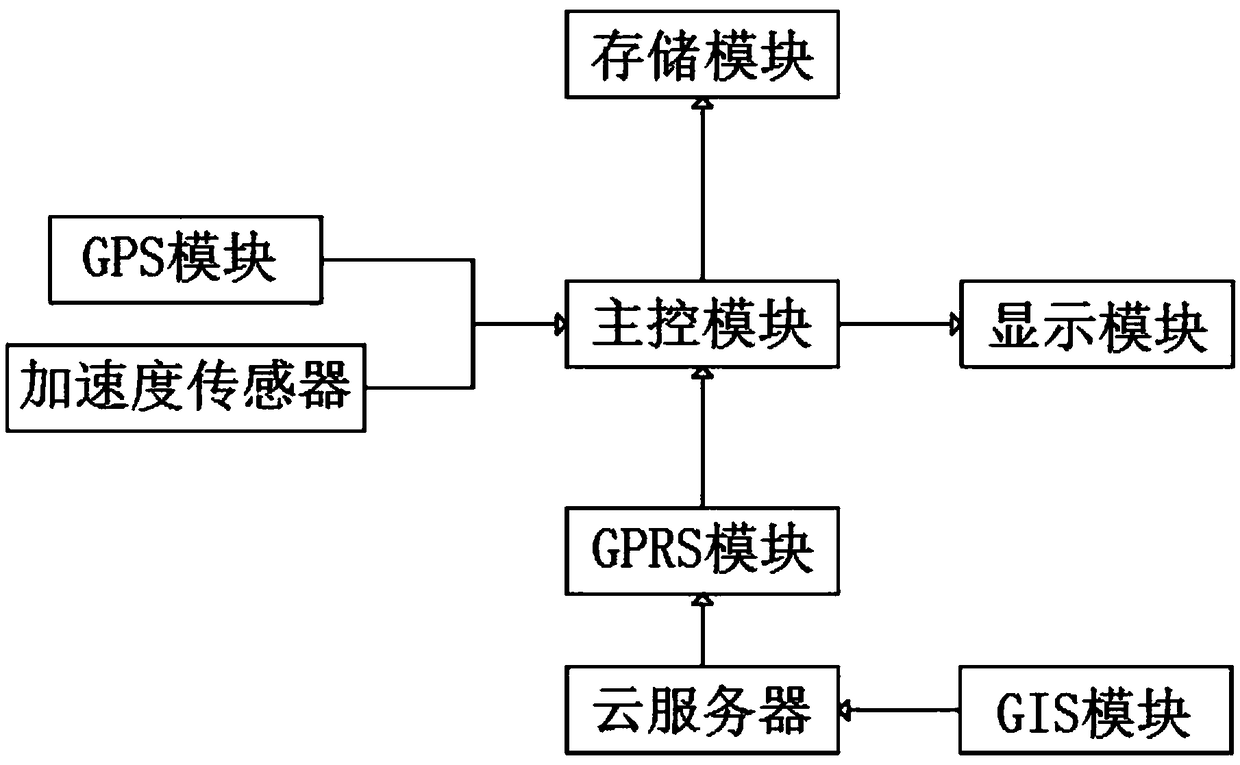
[0047] Such as figure 2 As shown, the AIS system includes a main control module 1 , a GPS module 2 , an acceleration sensor 3 , a storage module 4 , a display module 5 , a cloud server 7 and a GIS module 8 to obtain information required for ship navigation.
[0048] Further, the signal output port of the GPS module 2 and the output port of the acceleration sensor 3 are respectively connected to the signal input port of the main control module 1, and the signal input port of the storage module 4 is connected to the signal output port of the main control module 1 are connected to ensure that the information of the main control module 1 can be stored.
[0049] Further, the signal output port of the GPRS module 6 is connected with the signal input port of the main control module 1, the signal output port of the cloud server 7 is connected with the signal input port of the GPRS module 6, and the GIS module 8 The signal output port is connected with the signal input port of the cl...
Embodiment 3
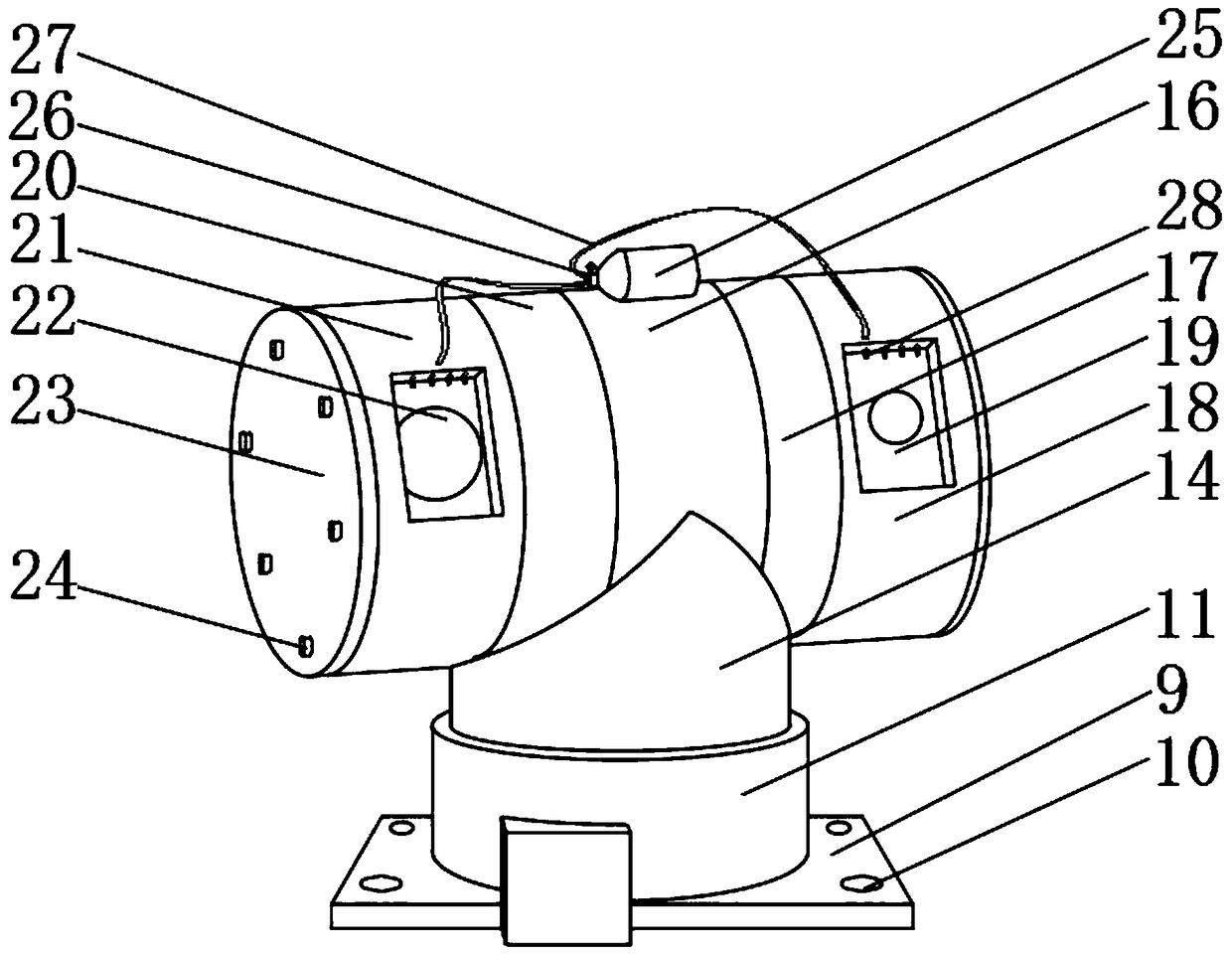
[0056] Such as Image 6 As shown, the upper end of the motor 12 is provided with a driving gear 13, and the outer surface of the rotating column 14 is provided with a driven gear 15, which is movably connected between the driving gear 13 and the driven gear 15, and the rotating column 14 is fixedly connected to the body 16, the input port of the motor 12 is electrically connected to the output port of the body 16, and the driven gear 15 and the driving gear 13 can drive the rotating column 14 to rotate.
[0057] The working principle of the carburizing box in this mold processing technology: when in use, cooperate with the AIS system to obtain the actual position, speed, course, draft and ship size of the ship through the GPS module, and obtain the acceleration of the ship through the acceleration sensor, and The information is transmitted to the main control module to obtain the ship's navigation information, and then obtain the surrounding environmental conditions of the shi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More