

A route planning method for multi-rotor UAV surveying and mapping under complex polygon survey area
A polygonal and surveying area technology, which is used in target search, low-altitude surveying and mapping UAV route planning, agricultural plant protection, and terrain exploration to achieve the effect of small redundant coverage area and short total route length.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below with reference to the accompanying drawings and examples.
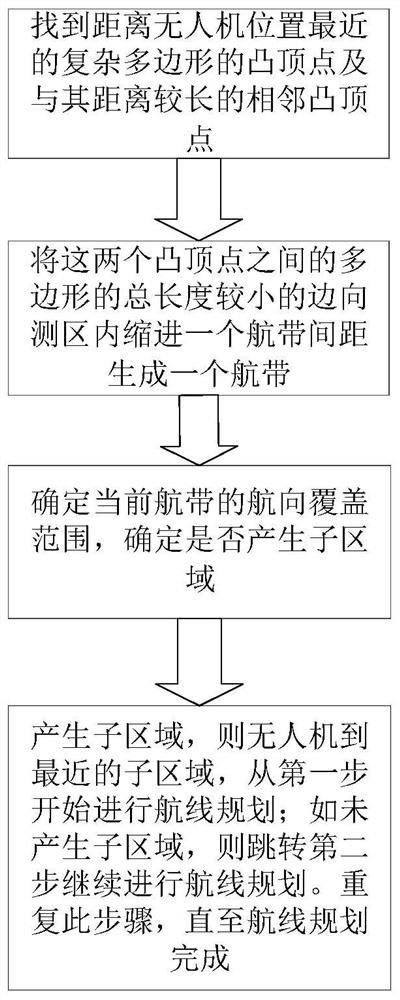
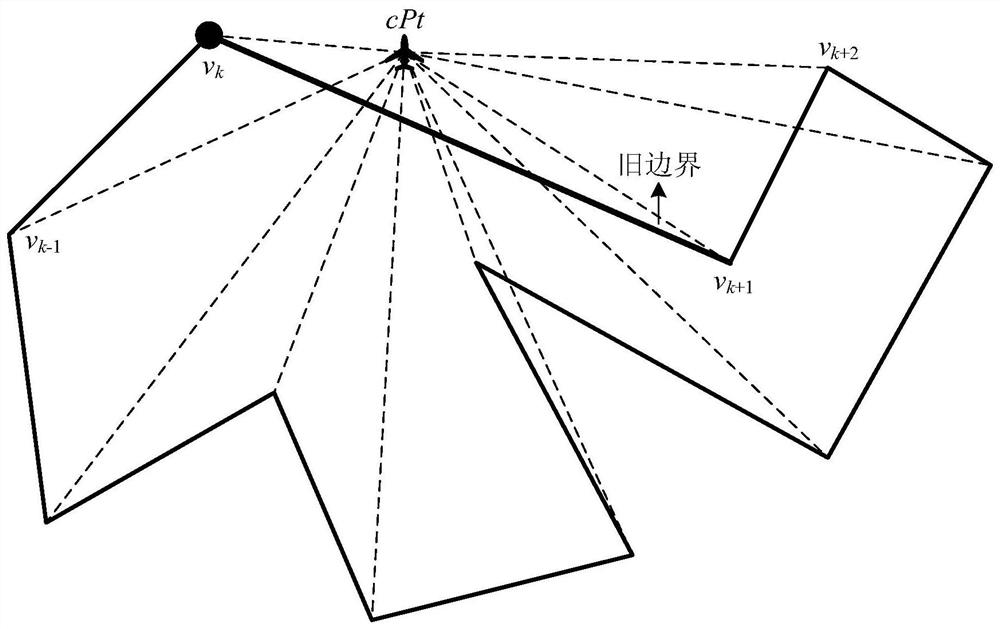
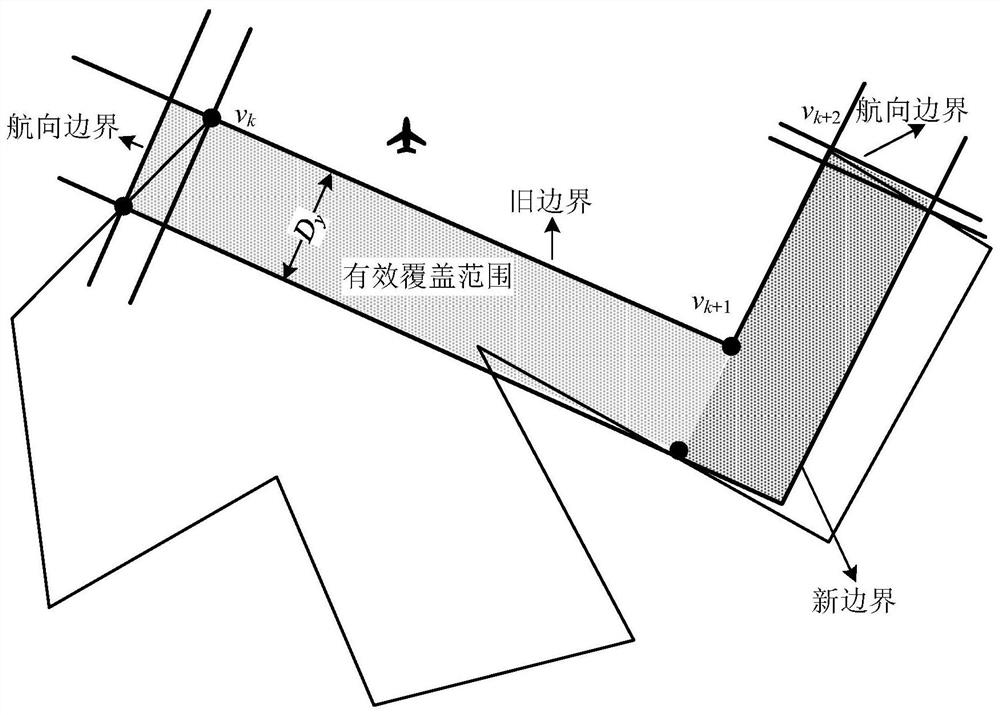
[0022] The present invention proposes a multi-rotor UAV surveying and mapping route planning method under complex polygonal surveying areas. Compared with the above-mentioned traditional methods, this scheme has smaller redundant coverage and fewer turns. The implementation method is mainly divided into two parts: the planning of a single flight path and the update of the remaining uncovered measurement areas: firstly, the planning of a single flight path is carried out according to the position of the UAV and the measurement area to be covered, and the longest flight path in the current state is obtained. Then consider the effective coverage area of the track, update the remaining uncovered area and treat it as a new survey area or a group of new surv...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More