

A motion control method for a robot, a servo controller and a readable storage medium
A technology of motion control and robotics, applied in the field of robotics, can solve problems such as large speed jitter
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0032] For purposes of the present invention, technical solutions, and advantages of the embodiments more clearly, the following respective embodiments of the present invention will be set forth in detail in conjunction with the accompanying drawings. However, those of ordinary skill in the art will be appreciated, in the embodiments of the present invention, in order to make the reader a better understanding of the present application proposed many technical details. However, without these technical details and various changes and modifications based on the following embodiments, the present application may be implemented as claimed technical solution.
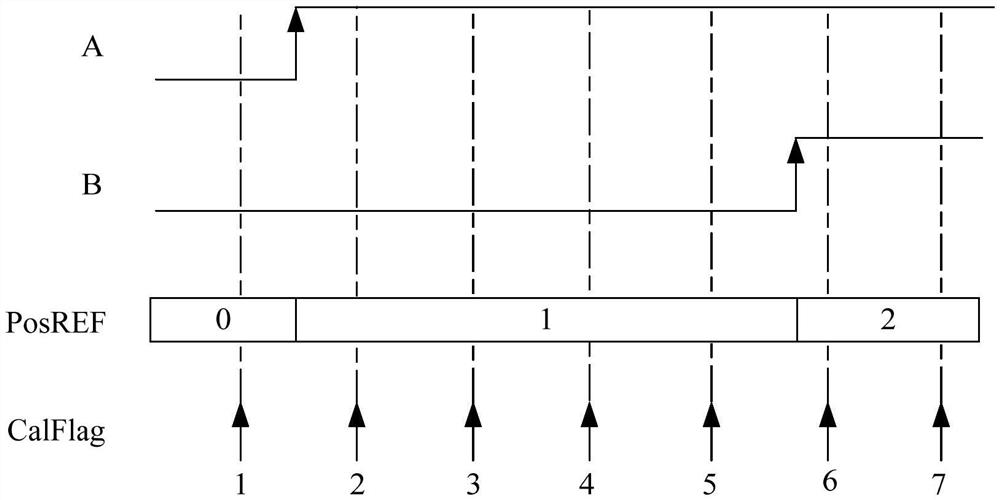
[0033] A first embodiment of the present invention relates to motion control method of a robot. Position command in this embodiment is a pulse sequence command, may be particularly a rising or falling pulse. Its processes as Figure 4 Shown as follows:
[0034] Step 401, history acquisition position command receiving time.
[0035...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More