

Control method for automatically yielding to special vehicles and vehicle-mounted system
A technology for special vehicles and on-board systems, which is applied in the field of control methods and on-board systems for automatic avoidance of special vehicles, and can solve problems such as personnel and property losses, delays in the best time for rescue, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
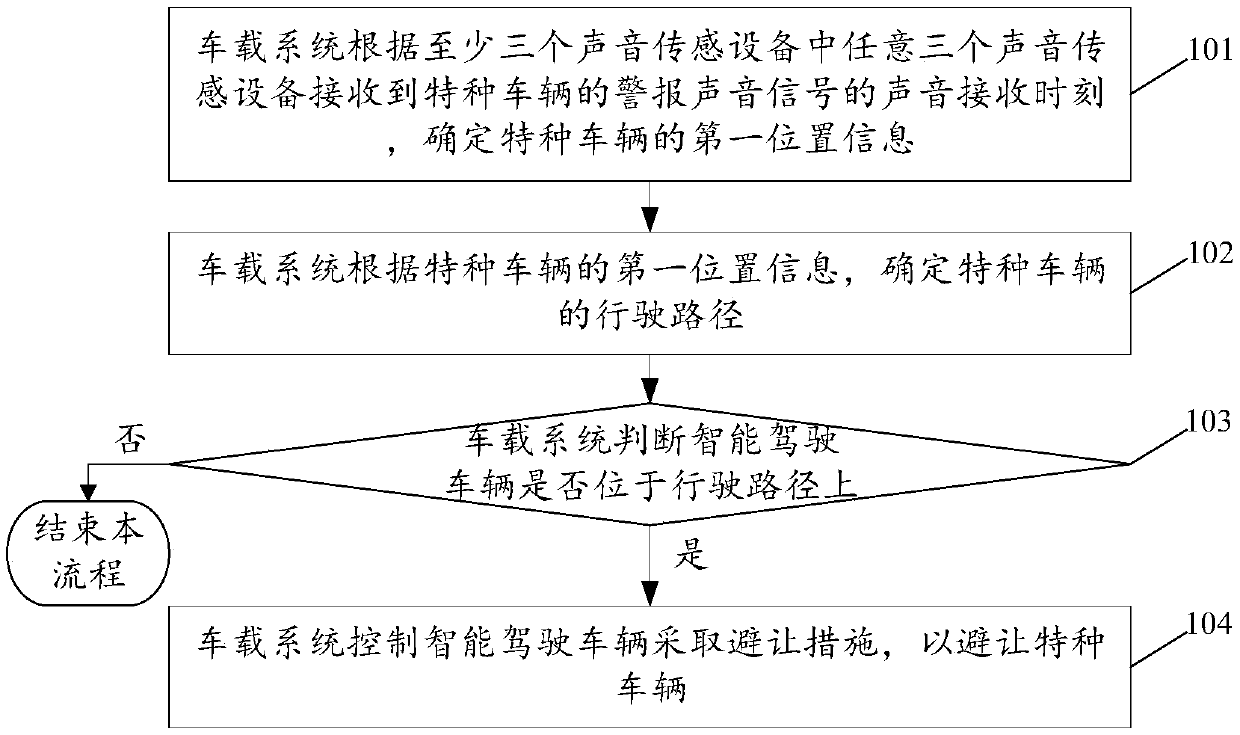
[0084] see figure 1 , figure 1 It is a schematic flowchart of a control method for automatically avoiding special vehicles disclosed in an embodiment of the present invention. Wherein, the method shown in the embodiment of the present invention is applied to the vehicle-mounted system, the vehicle-mounted system is installed on the intelligent driving vehicle, and at least three sound sensing devices are respectively installed in different directions of the intelligent driving vehicle. Such as figure 1 As shown, the control method for this automatic avoidance special vehicle may include the following steps:
[0085] 101. The vehicle-mounted system determines the first location information of the special vehicle according to the sound receiving time when any three of the at least three sound sensing devices receive the alarm sound signal of the special vehicle.
[0086] In the embodiment of the present invention, the vehicle-mounted system detects the alarm sound signal of t...
Embodiment 2
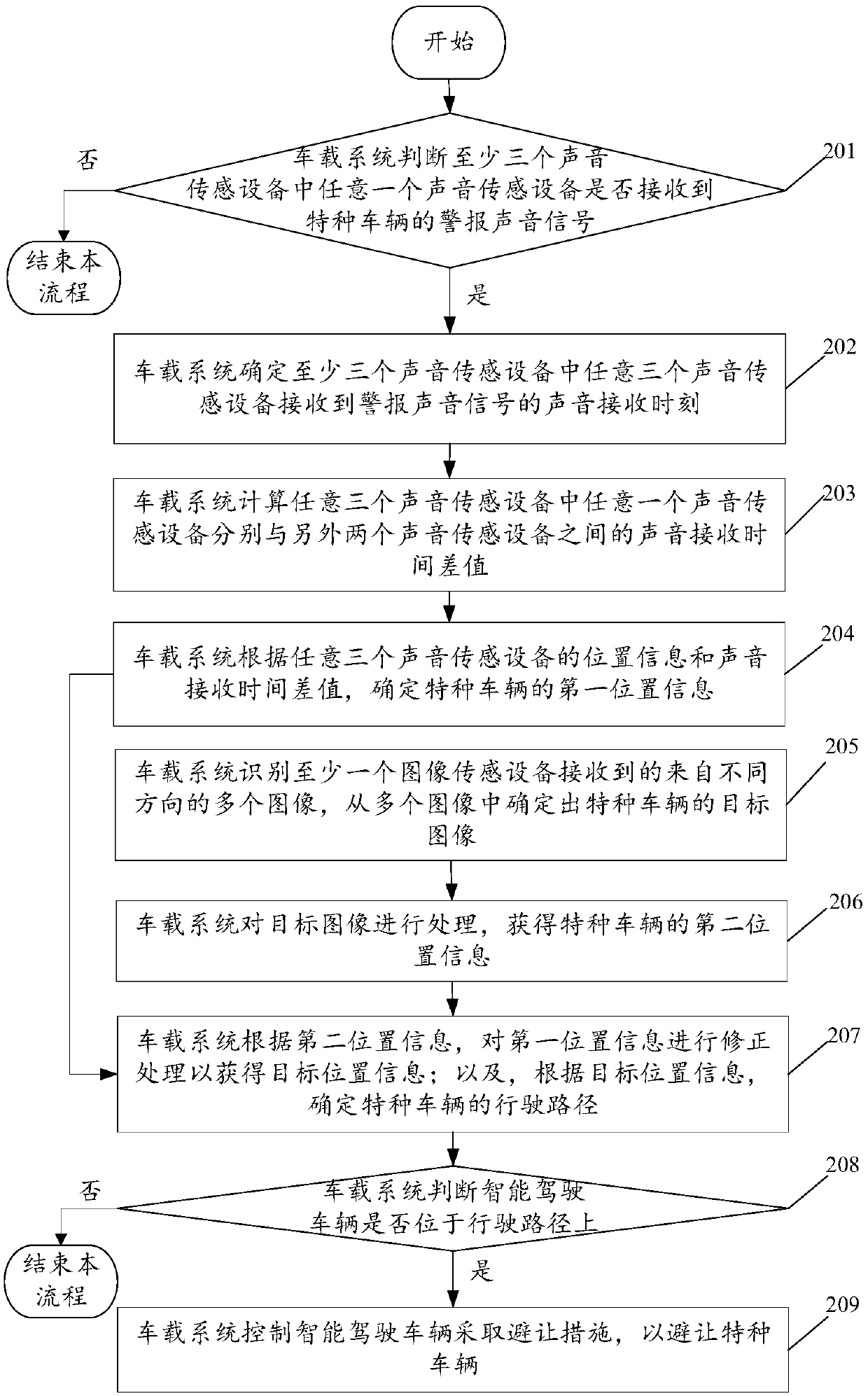
[0099] see figure 2 , figure 2It is a schematic flowchart of another control method for automatically avoiding special vehicles disclosed in the embodiment of the present invention. Wherein, in addition to at least three sound sensing devices installed in different directions of the intelligent driving vehicle, there is at least one image sensing device installed on the intelligent driving vehicle. Such as figure 2 As shown, the control method for this automatic avoidance special vehicle may include the following steps:
[0100] 201. The vehicle-mounted system judges whether any one of the at least three sound sensing devices receives an alarm sound signal of a special vehicle. If yes, execute step 202; otherwise, end this process.
[0101] As an optional implementation manner, before performing step 201, the vehicle-mounted system can pre-process the alarm sound signals of special vehicles received by at least three sound sensing devices, such as sampling, quantificati...
Embodiment 3
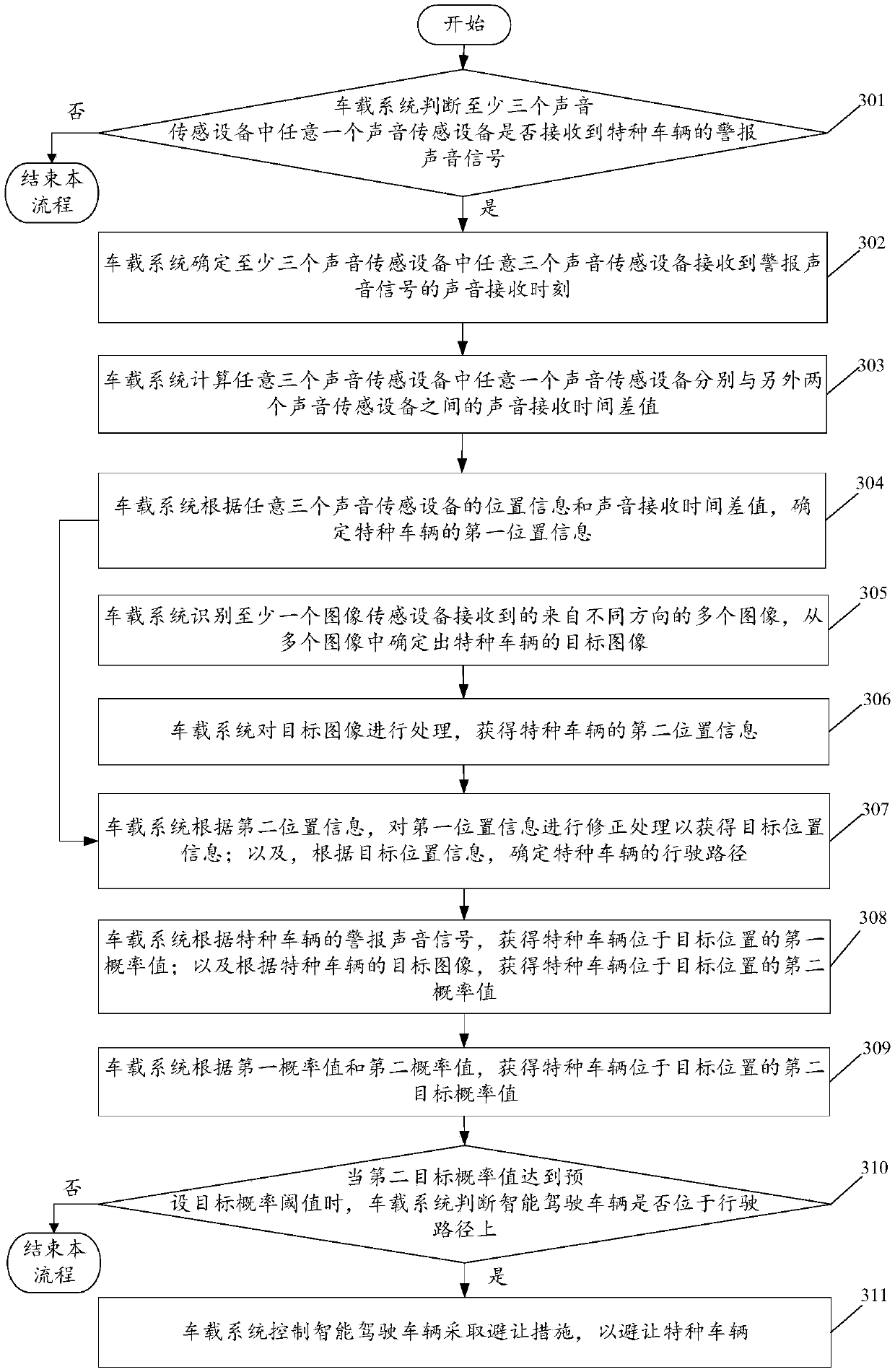
[0127] see image 3 , image 3 It is a schematic flowchart of another control method for automatically avoiding special vehicles disclosed in the embodiment of the present invention. Such as image 3 As shown, the control method for this automatic avoidance special vehicle may include the following steps:
[0128] 301-307. Wherein, steps 301 to 307 are the same as steps 201 to 207 described in Embodiment 2, and will not be repeated in this embodiment of the present invention.
[0129] 308. The in-vehicle system obtains the first probability value that the special vehicle is located at the target position according to the alarm sound signal of the special vehicle; and obtains the second probability value that the special vehicle is located at the target position according to the target image of the special vehicle.
[0130] 309. The vehicle-mounted system obtains a second target probability value that the special vehicle is located at the target position according to the fi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More