

An edge cloud based UAV obstacle avoidance system and method
A first UAV obstacle avoidance and UAV technology, applied in the field of UAV, can solve the problems of low precision and long data processing time, achieve technical effects, efficient and accurate processing, and avoid data processing long time effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
no. 1 example
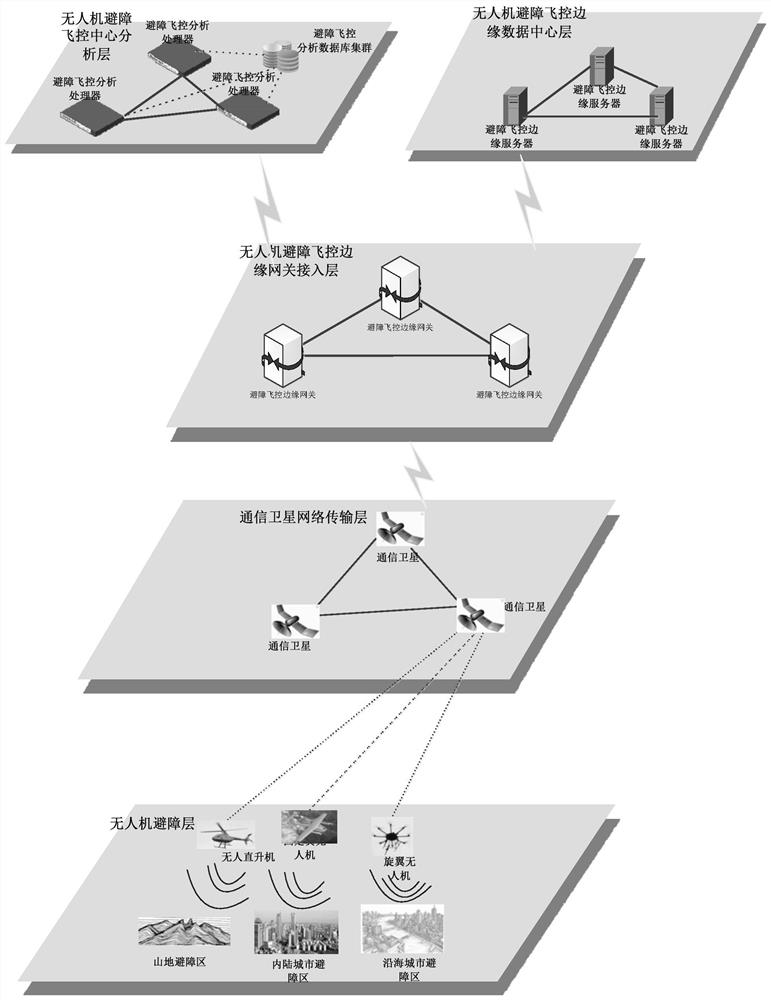
[0092] see figure 1 , figure 1 It is a schematic structural diagram of an edge cloud-based UAV obstacle avoidance system provided by an embodiment of the present invention.
[0093] Such as figure 1 As shown, the system includes: communication satellite network transmission layer, UAV obstacle avoidance flight control edge gateway access layer and UAV obstacle avoidance flight control edge data center layer, wherein,
[0094] The communication satellite network transmission layer is used to obtain the UAV obstacle avoidance flight control request sent by the UAV, and transmit the UAV obstacle avoidance flight control request to the UAV obstacle avoidance flight control edge gateway access layer.
[0095] to combine figure 1 It can be seen that UAVs are located on the UAV obstacle avoidance layer, and UAVs include unmanned helicopters, fixed-wing UAVs, and rotary-wing UAVs. During the flight of the UAV in the mountains, it is necessary to avoid obstacles in the mountains, t...
no. 2 example
[0110] This embodiment is based on the first embodiment. In this example, combined with figure 1 It can be seen that the system also includes: UAV obstacle avoidance flight control center analysis layer, wherein,
[0111] The access layer of the UAV obstacle avoidance flight control edge gateway is also used to: transmit the second UAV obstacle avoidance flight control request to the analysis layer of the UAV obstacle avoidance flight control center, wherein the UAV obstacle avoidance flight control request It also includes a second UAV obstacle avoidance flight control request.
[0112] The analysis layer of the UAV obstacle avoidance flight control center is used to: call the second obstacle avoidance flight control service stored in it corresponding to the second UAV obstacle avoidance flight control request, and transmit the second obstacle avoidance flight control service to the wireless Human-machine obstacle avoidance flight control edge gateway access layer.
[0113...
no. 3 example
[0121] This embodiment is based on the second embodiment. In this embodiment, the analysis layer of the UAV obstacle avoidance flight control center is also used for:
[0122] According to the preset first iterative analysis rule, the second UAV obstacle avoidance flight control request is iteratively analyzed and processed to obtain a plurality of sub-request information, wherein the second UAV obstacle avoidance flight control request includes a plurality of sub-requests, one sub-request The request corresponds to a sub-request information;
[0123] Summarize and process multiple sub-request information to obtain request information;
[0124] The request information is iteratively analyzed and processed according to the preset second iterative analysis rule to obtain the second obstacle avoidance flight control service.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More