

A method for positioning and segmenting parts to be measured in 3D point cloud measurement, and a scanner
A point cloud and part technology, applied in the field of scanners, can solve the problems of only shooting planes, taking a lot of time, and increasing errors in measurement, and achieves the effect of wide use scenarios and flexible use.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] In order to make the object, technical solution and advantages of the present invention more clear, the present invention will be further described in detail below in conjunction with the examples. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
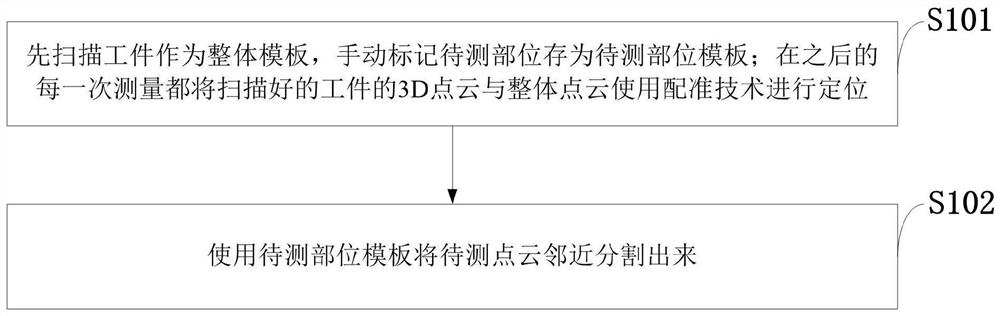
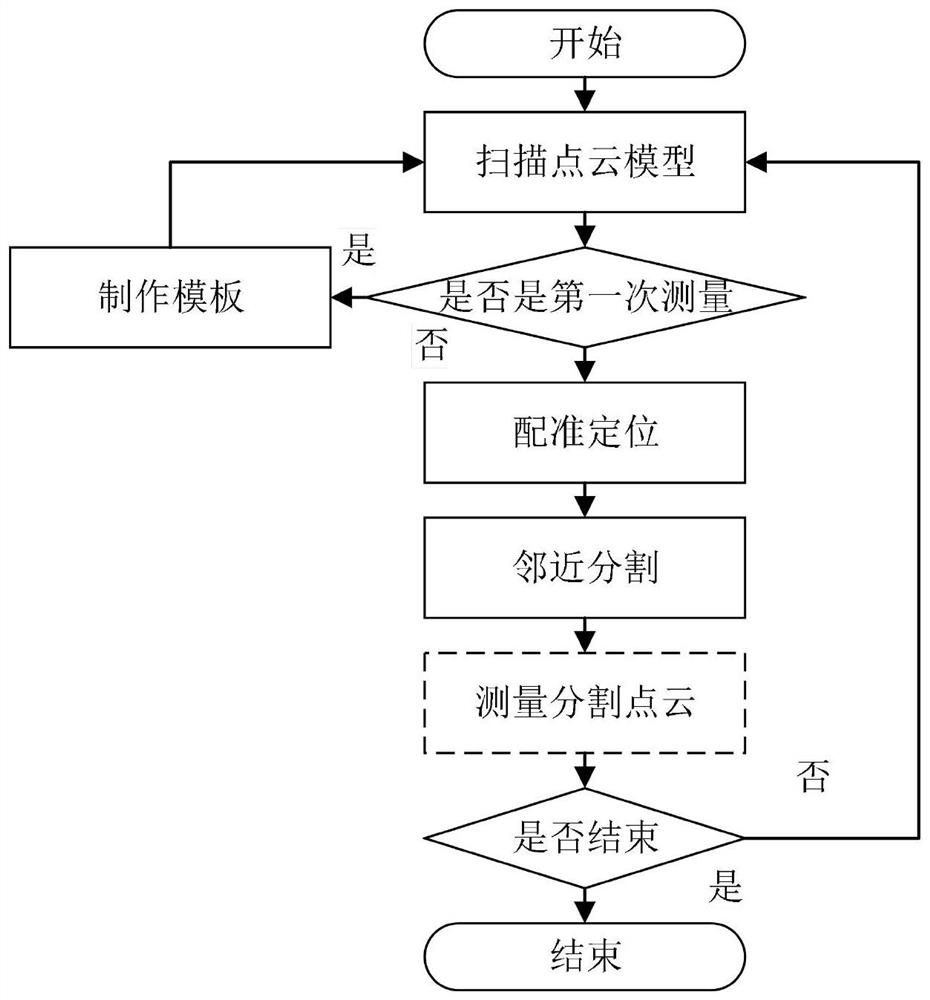
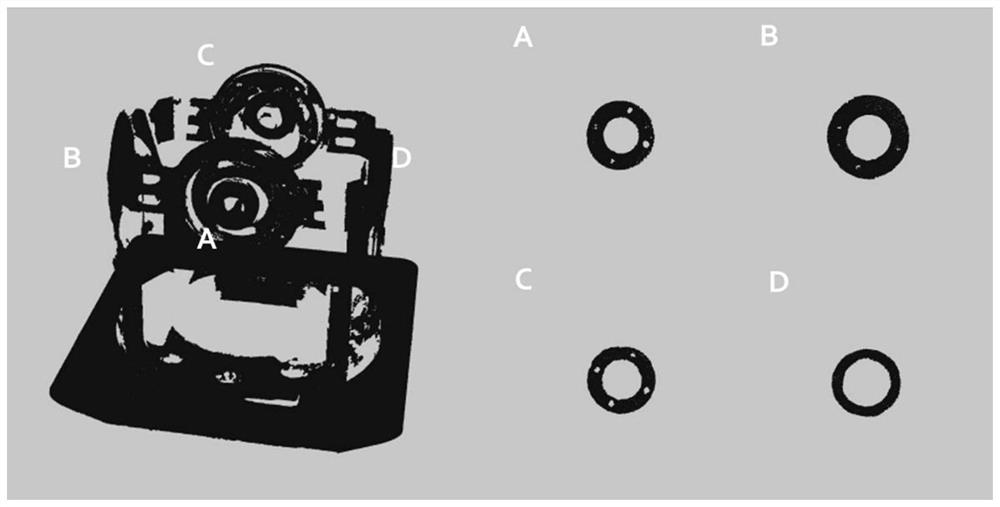
[0032] According to the existing technology, only the part of the plane to be measured is photographed, which limits the viewing angle; only the plane can be photographed, and other geometric shapes such as the circle cannot be effectively photographed; manually taking the points to be measured takes more time, which increases the error of the measurement . The invention is a technique for locating and segmenting the parts to be measured of the workpiece point cloud for subsequent measurement.
[0033] The application principle of the present invention will be described in detail below in conjunction with the accompanying ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More