

Slave-type lower limb gait training rehabilitation robot system
A rehabilitation robot and gait training technology, applied in the field of rehabilitation robots, can solve the problems of the therapist's high labor intensity, training intensity, continuity, and difficulty in ensuring pertinence, so as to prevent secondary injuries, have strong robustness, and improve The effect of practicality
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
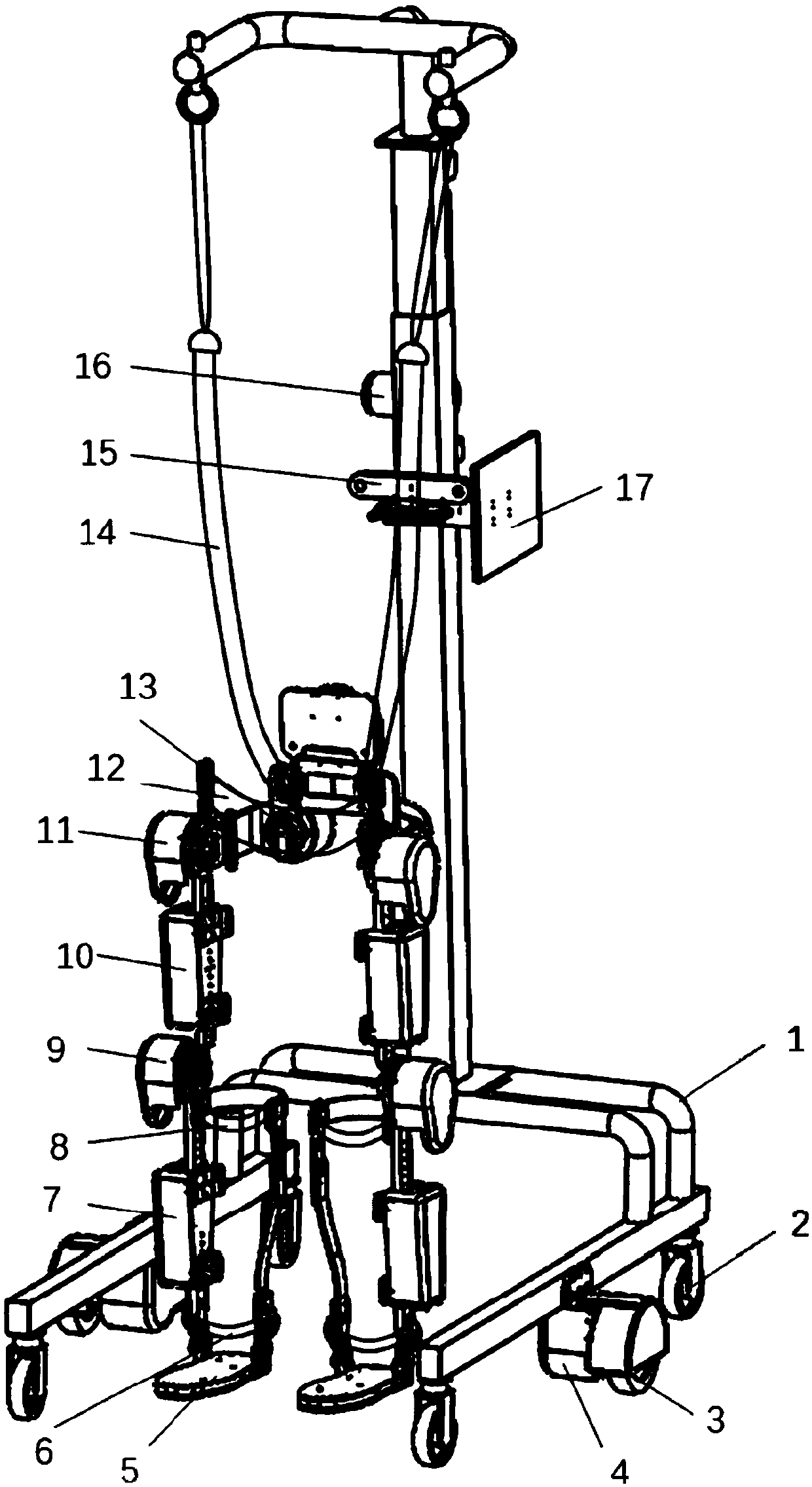
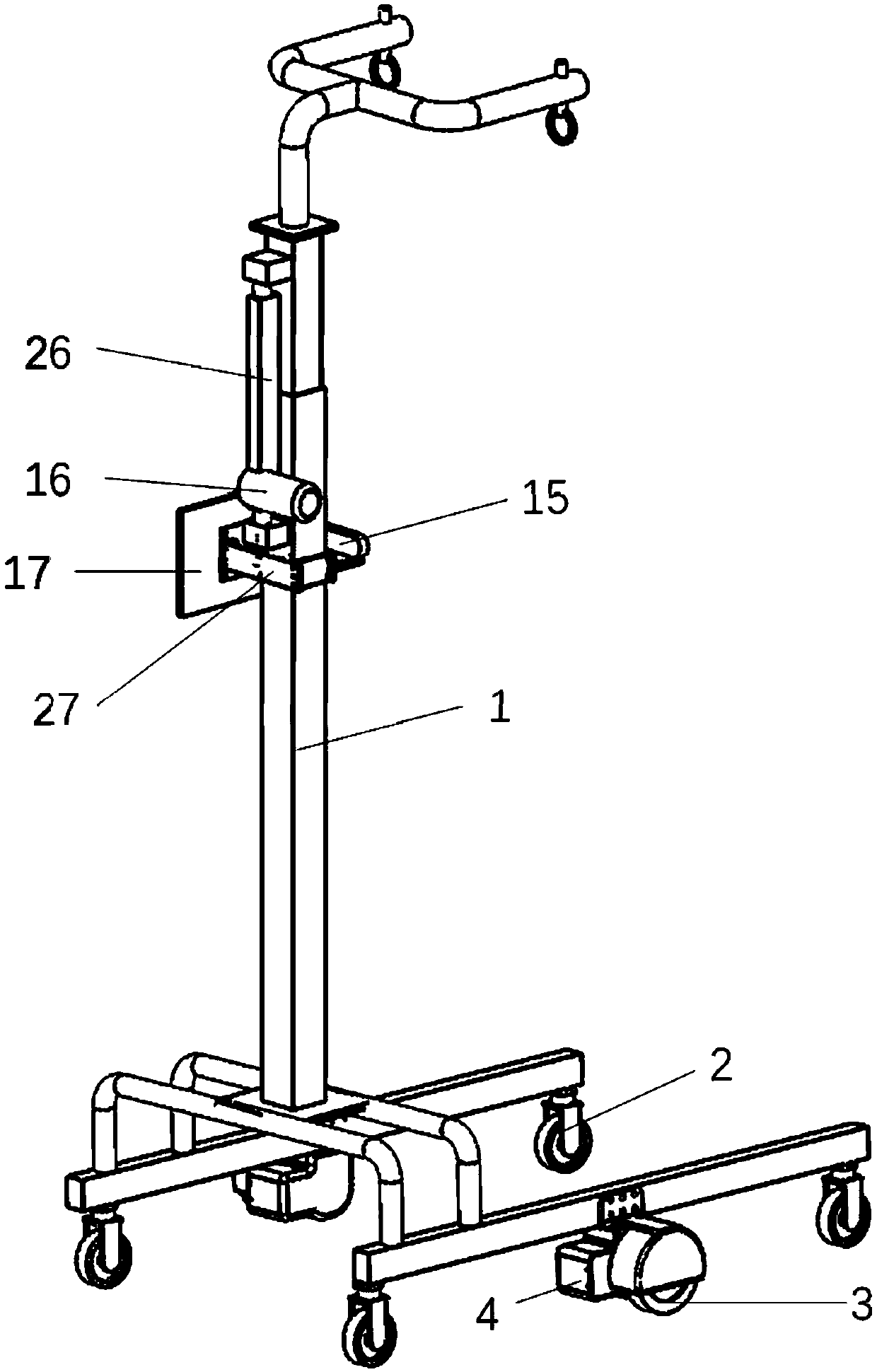
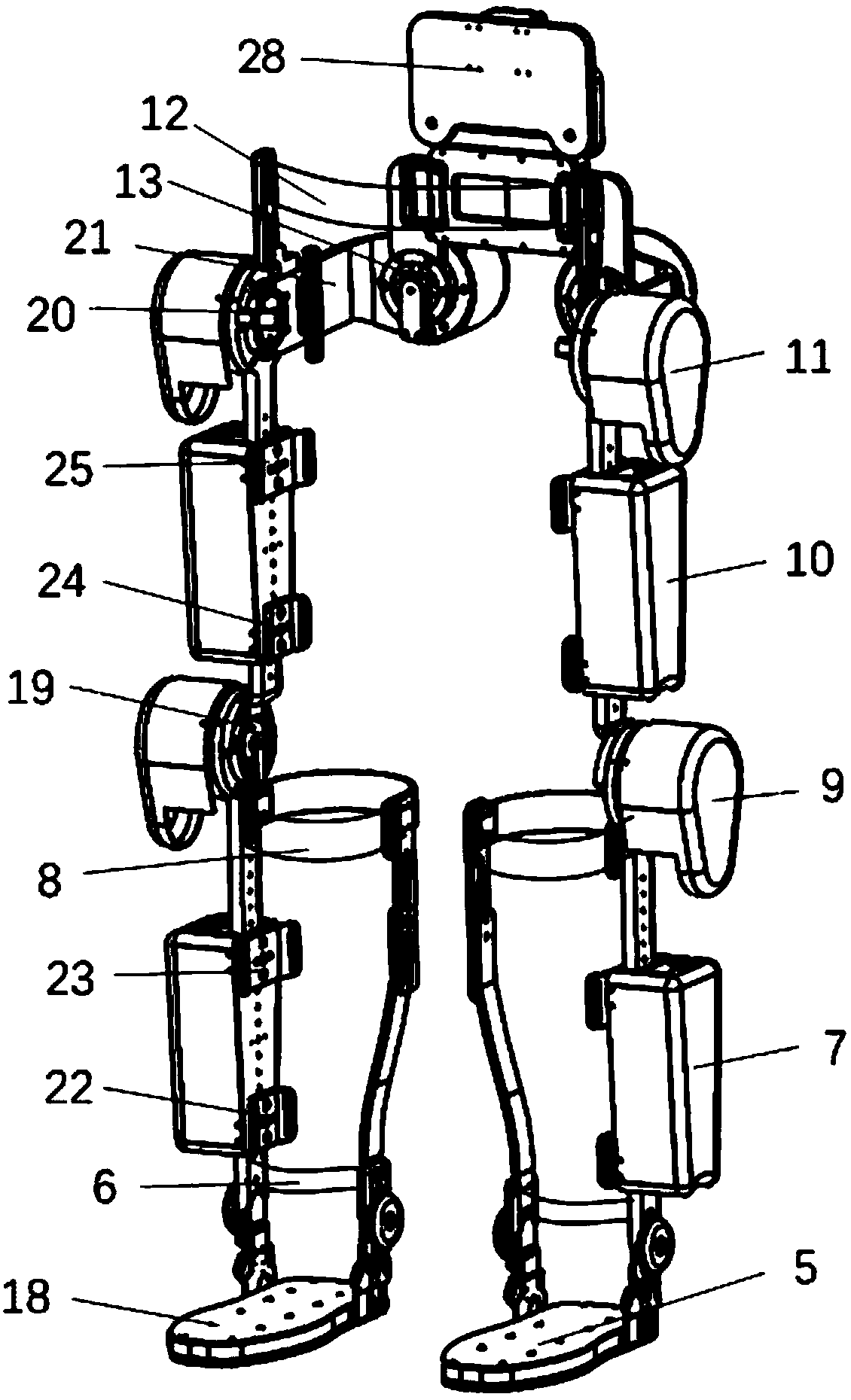
[0038] The follow-up lower limb gait training rehabilitation robot system provided by the embodiment of the present invention includes a connected lower limb wearable exoskeleton robot and a follower robot, and its structure can be referred to figure 1 with figure 2 shown;
[0039] The follower robot includes a support frame 1 and a traveling mechanism and a driving mechanism installed thereon.
[0040] From the above technical solutions, it can be seen tha...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More