

Wheel type mobile robot trajectory tracking method based on disturbance observer
A technology of mobile robots and disturbance observers, applied in the directions of instruments, non-electric variable control, two-dimensional position/course control, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The technical solutions and beneficial effects of the present invention will be described in detail below in conjunction with the accompanying drawings.
[0021] Such as Figure 8 As shown, the present invention provides a method for track tracking of a wheeled mobile robot based on a disturbance observer, comprising the following steps:
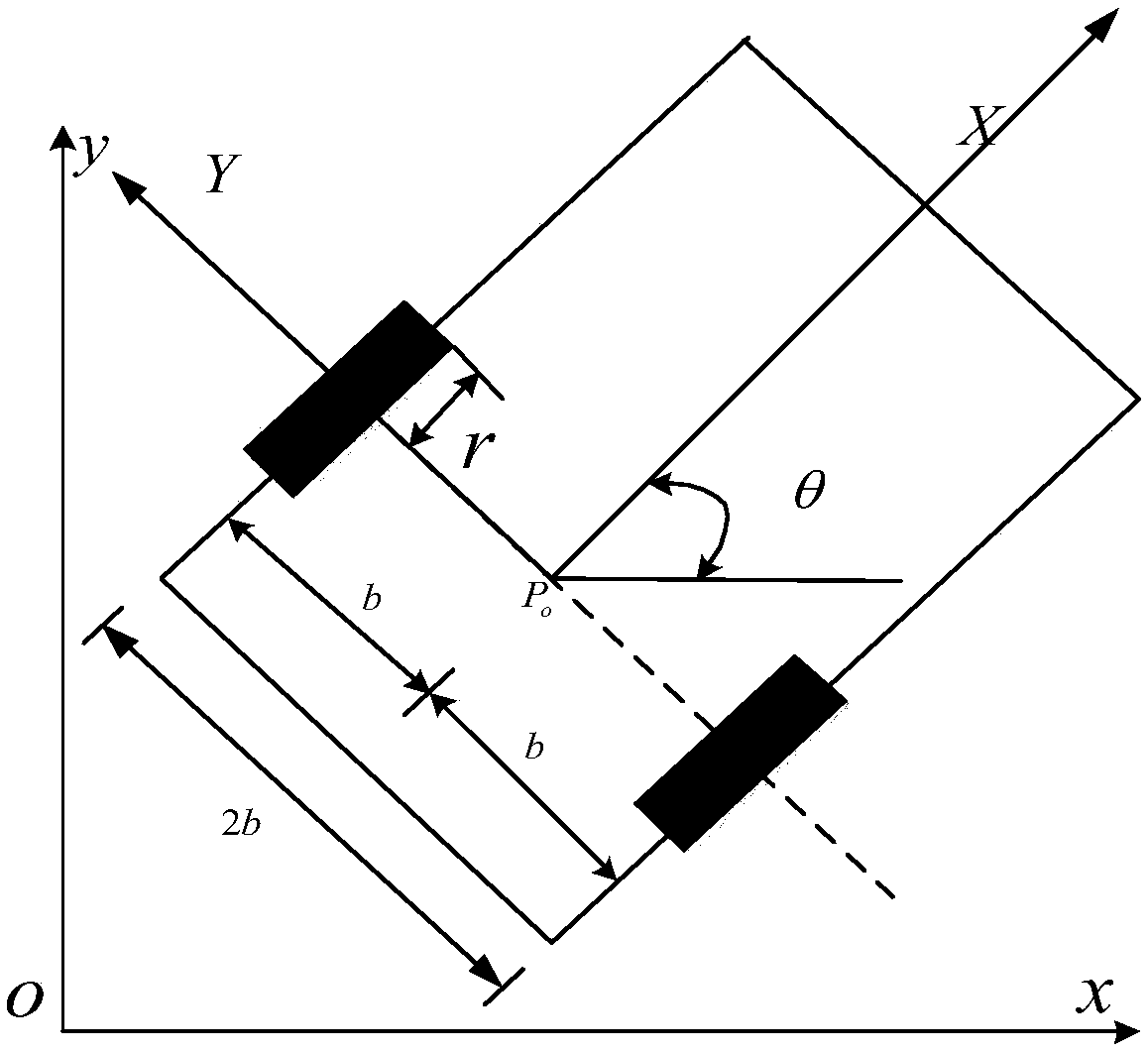
[0022] Step 1, analyze the actuator of the wheeled mobile robot, and establish the kinematics model and dynamics model of the wheeled mobile robot with non-integrity constraints;
[0023] Among them, the kinematics model of the wheeled mobile robot is expressed as:
[0024]
[0025] where, q=[x,y,θ] T Represents the pose, v, w represent the linear velocity and angular velocity of the wheeled mobile robot, respectively.
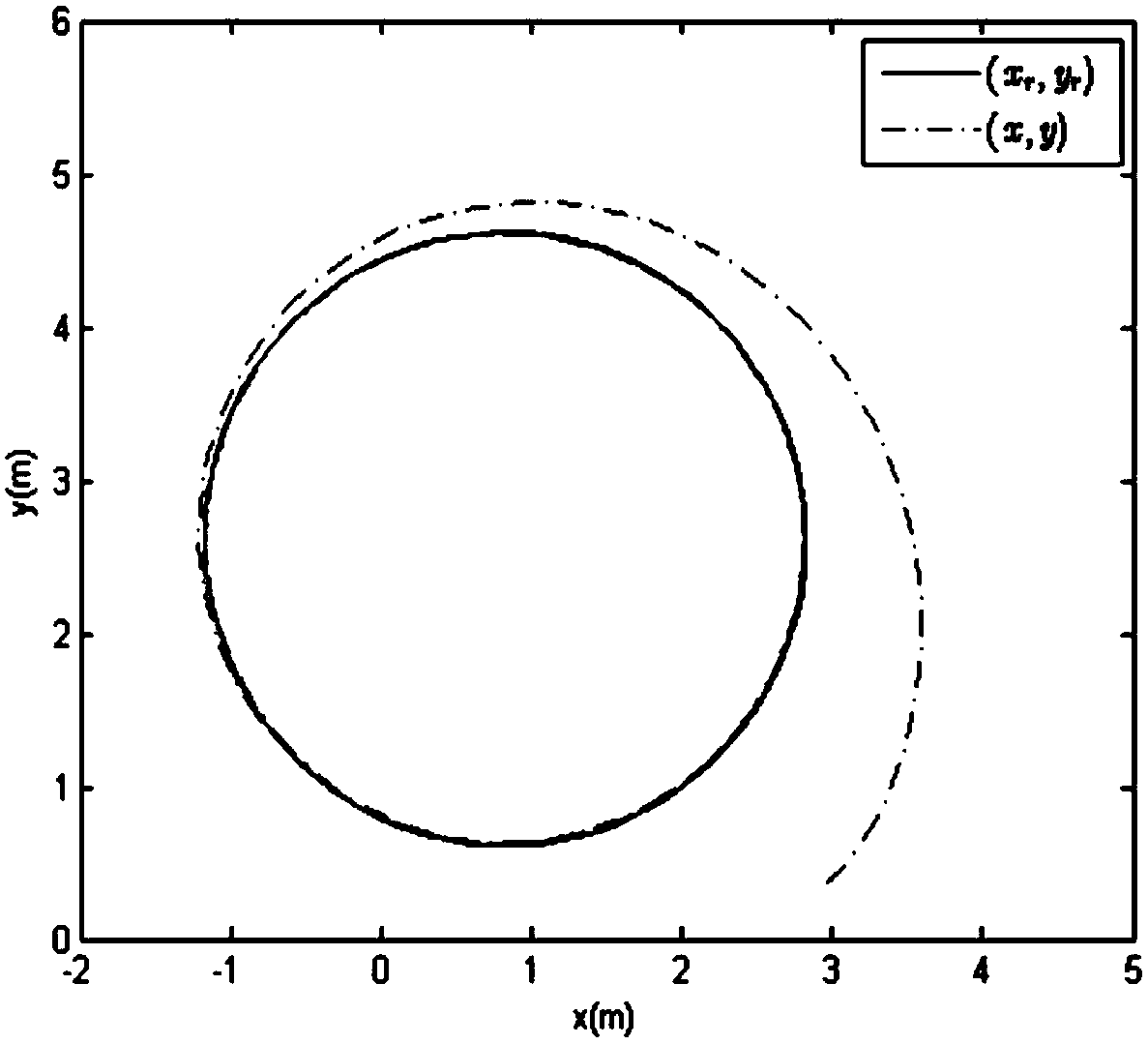
[0026] The desired trajectory of a wheeled mobile robot is:
[0027]
[0028] Among them, q r =[x r ,y r ,θ r ] T represents the desired pose, (v r ,w r ) is the expected linear velocity and angular v...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More