

Electromechanical servo system friction compensation and variable structure control method based on neural network
A technology of electromechanical servo system and variable structure control, which is applied in the direction of adaptive control, general control system, control/regulation system, etc., and can solve problems such as uncertain parameters and unmeasurable states
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
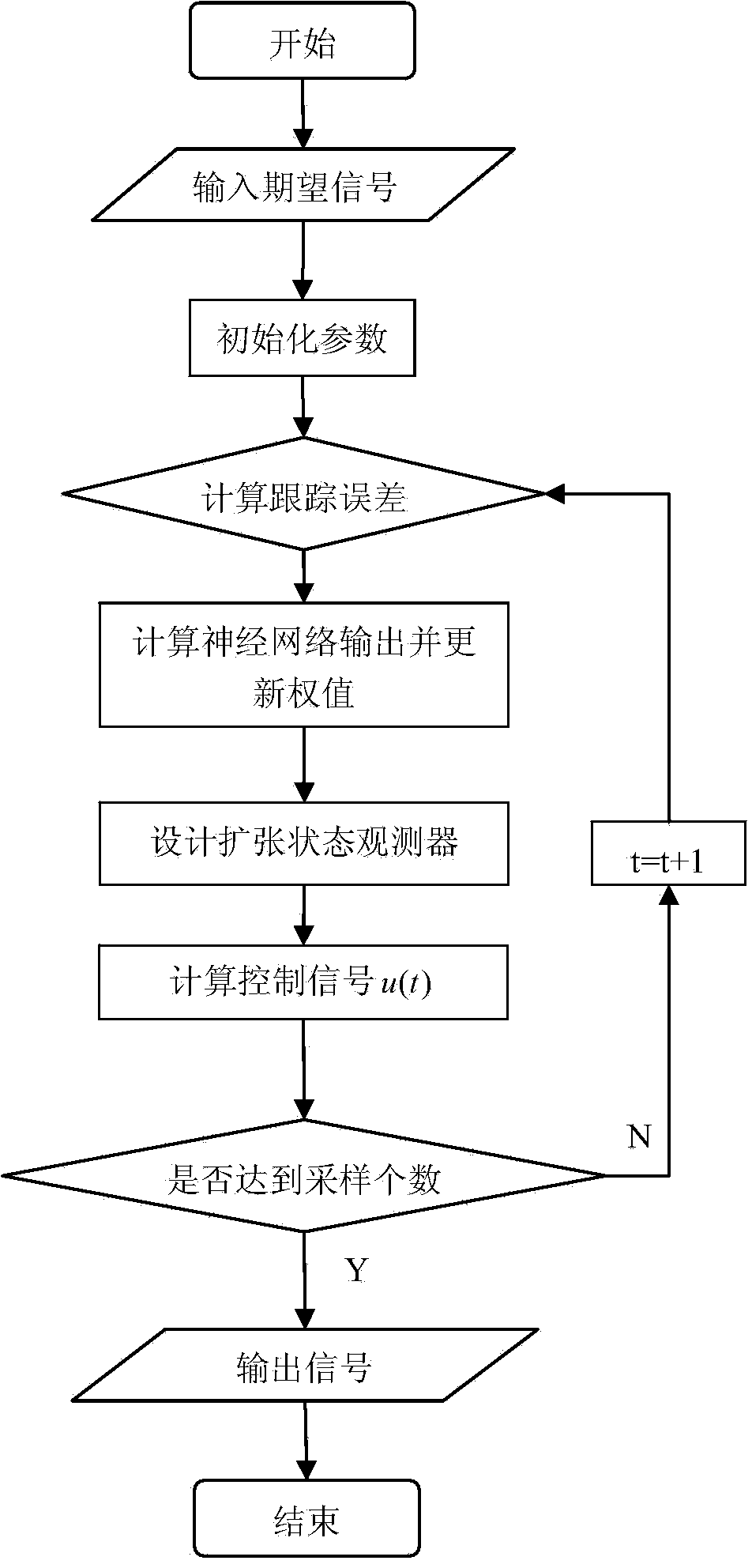
[0073] Refer to attached Figure 1-6 , a method for friction compensation and variable structure control of electromechanical servo systems based on neural networks, including the following steps:
[0074] Step 1, establish the electromechanical servo system model shown in formula (1), initialize the system state and related control parameters;
[0075] d θ m dt = ω m J d ω m dt = K t ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More