

Unmanned surface vessel linear tracking method based on fuzzy PID
A surface craft, fuzzy technology, applied in the direction of control, instrumentation, adaptive control, etc. to find the target
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] In order to make the technical means, creative features, goals and effects achieved by the present invention easy to understand, the present invention will be further elaborated below in conjunction with specific illustrations:
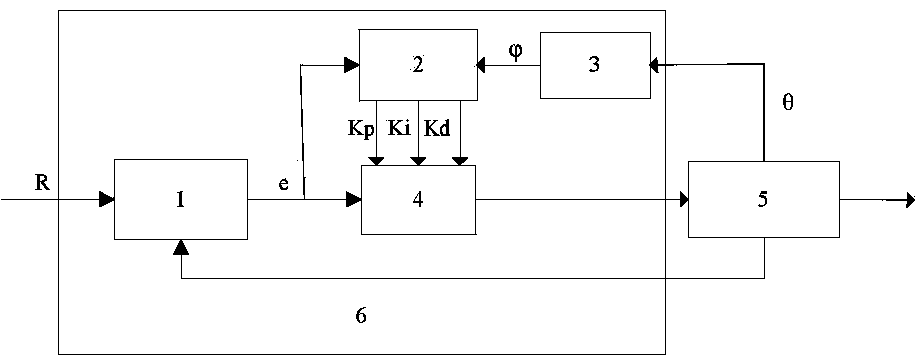
[0039] like figure 1 As shown, the GPS device is installed on the unmanned surface vehicle, which can dynamically obtain the heading angle θ and the current latitude and longitude coordinates (X, Y). The fuzzy PID controller is mainly divided into four parts, which are distance calculator, angle deviation comparator, PID controller and fuzzy reasoning module.
[0040] figure 1 Among them, R is the specified path, and e is the distance error between the unmanned surface vehicle and the target path. The fuzzy reasoning module uses the distance deviation e and the heading angle deviation Adjust the PID parameter value online, and its output is the value of each PID parameter. The PID controller uses the adjusted PID parameters and the current...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More