Fault diagnosis method for underwater robot thrusters based on wavelet modified Bayesian convolution energy
A technology of underwater robots and thrusters, which is applied in the direction of instruments, test/monitoring control systems, control/regulation systems, etc., can solve the problem of strong volatility of dynamic signal singularity behavior, weak amplitude of dynamic signal singularity behavior, and influence on fault energy characteristics Size and other issues, to achieve the effect of accurate classification
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
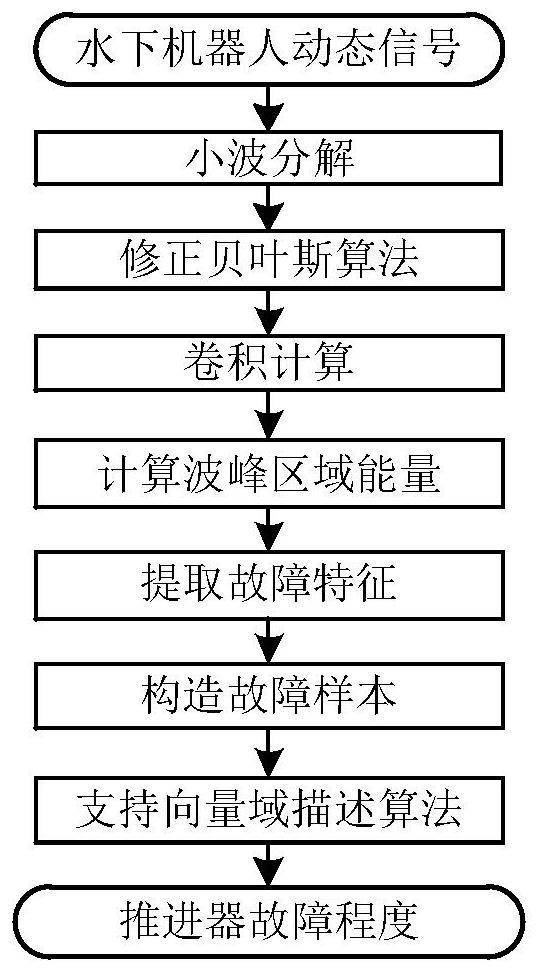
[0055] Such as figure 1 As shown, a kind of underwater robot thruster fault diagnosis method based on wavelet modified Bayesian convolution energy of the present embodiment, the specific steps are as follows:
[0056] The first step is to collect and record dynamic signals such as the speed of the underwater robot and the rate of change of the thruster control voltage, using a length L 1 The time domain window function of =400 intercepts the dynamic signal;
[0057] In the second step, the conventional wavelet decomposition is performed on the data obtained in the first step to obtain the wavelet approximate component s A (n), n is the data serial number, and the value range of n is 1~L 1 Integer between;
[0058] In the third step, the conventional modified Bayesian algorithm is used to approximate the wavelet component s obtained in the second step A (n) to perform operations, wherein the modified Bayesian step size is N 2 , the calculation formulas are shown in formula...
Embodiment 2
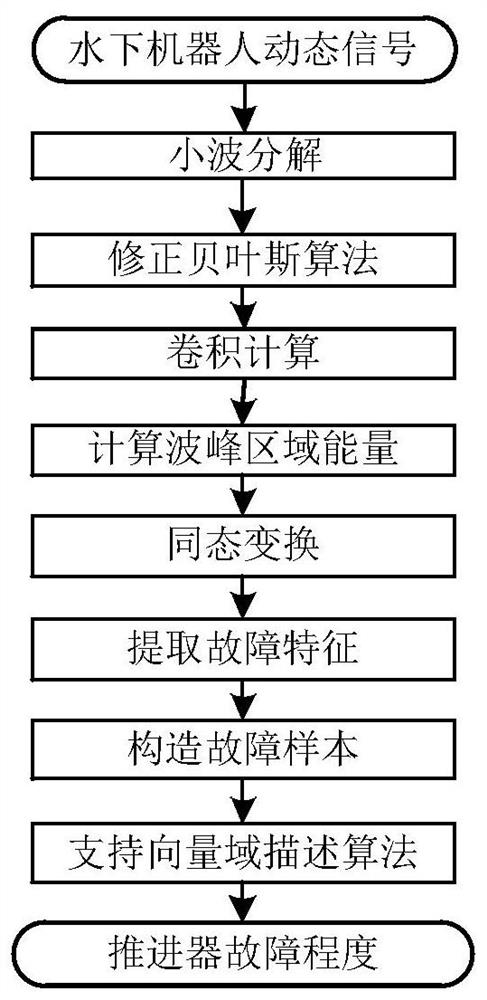
[0088] Such as figure 2 As shown, a kind of underwater robot thruster fault diagnosis method based on wavelet modified Bayesian convolution energy of the present embodiment, the specific implementation steps are as follows:
[0089] The first step is to collect and record dynamic signals such as the speed signal of the underwater robot and the rate of change signal of the thruster control voltage, using a length L 1 The time domain window function of =400 intercepts the dynamic signal;
[0090] In the second step, wavelet decomposition is performed on the data in the time window, and the wavelet approximate component s is extracted A (n);
[0091] In the third step, the modified Bayesian algorithm is used to approximate the wavelet component s obtained in the second step A (n) to perform operations, the corrected Bayesian step size is N 2 , the calculated result is d sA (n), the calculation process is shown in formula (1) to formula (6).
[0092] The fourth step is to c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More