

UAV identification and positioning system based on rgb_d and deep convolutional network
A deep convolution, UAV technology, used in character and pattern recognition, computer parts, image analysis, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
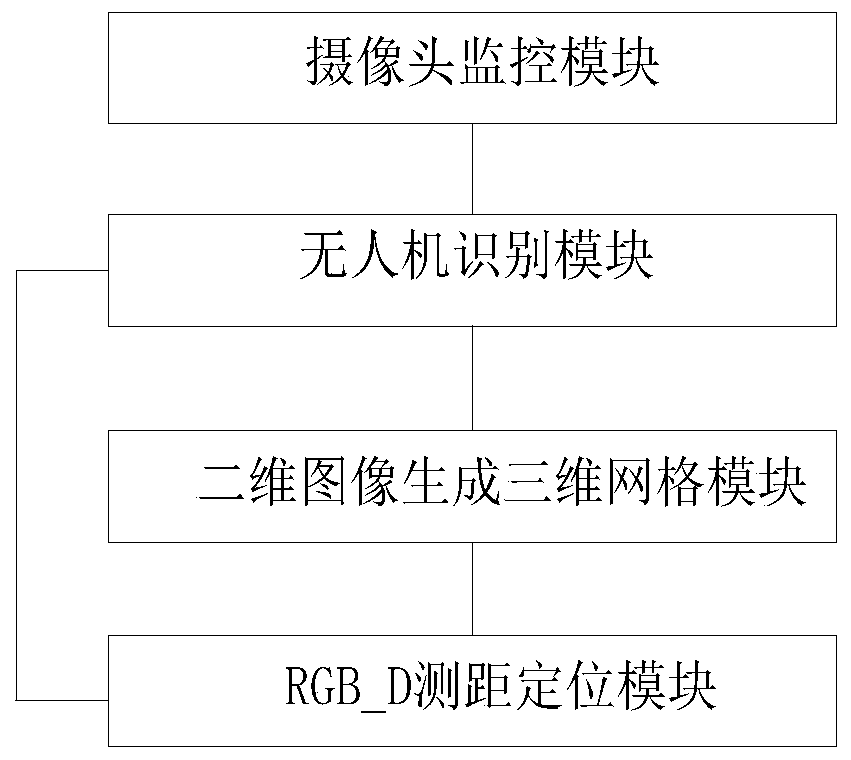
[0033] This embodiment provides a UAV identification and positioning system based on RGB_D and deep convolutional network, such as figure 1 As shown, it includes camera monitoring module, UAV identification module, 2D image generation 3D grid module and RGB_D distance measurement and positioning module;
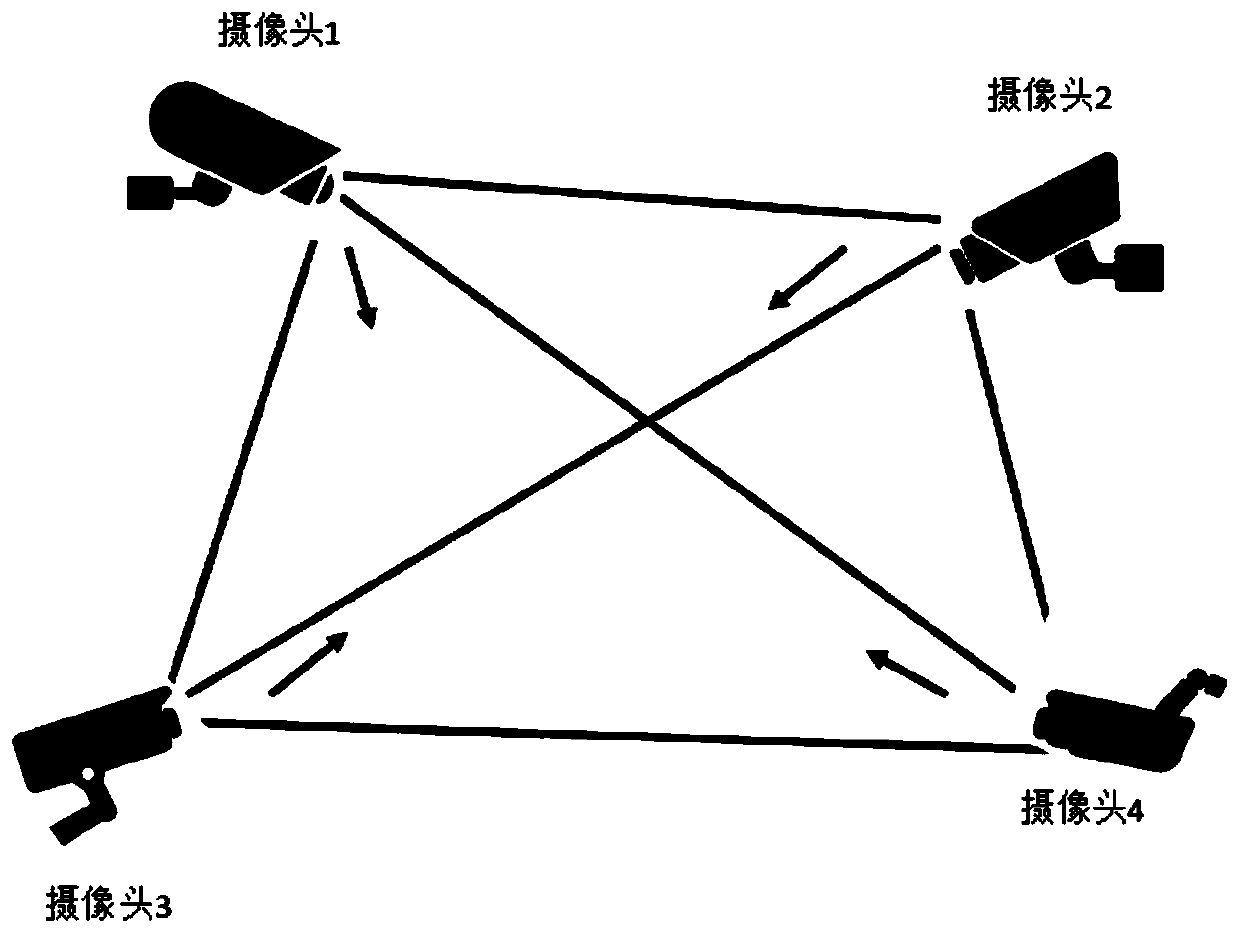
[0034] The camera monitoring module is used to obtain images of the entire monitoring area;
[0035] The UAV identification module receives the image of the monitoring area obtained by the camera monitoring module, matches with the pre-stored UAV image features, and identifies whether there is an UAV in the monitoring area;
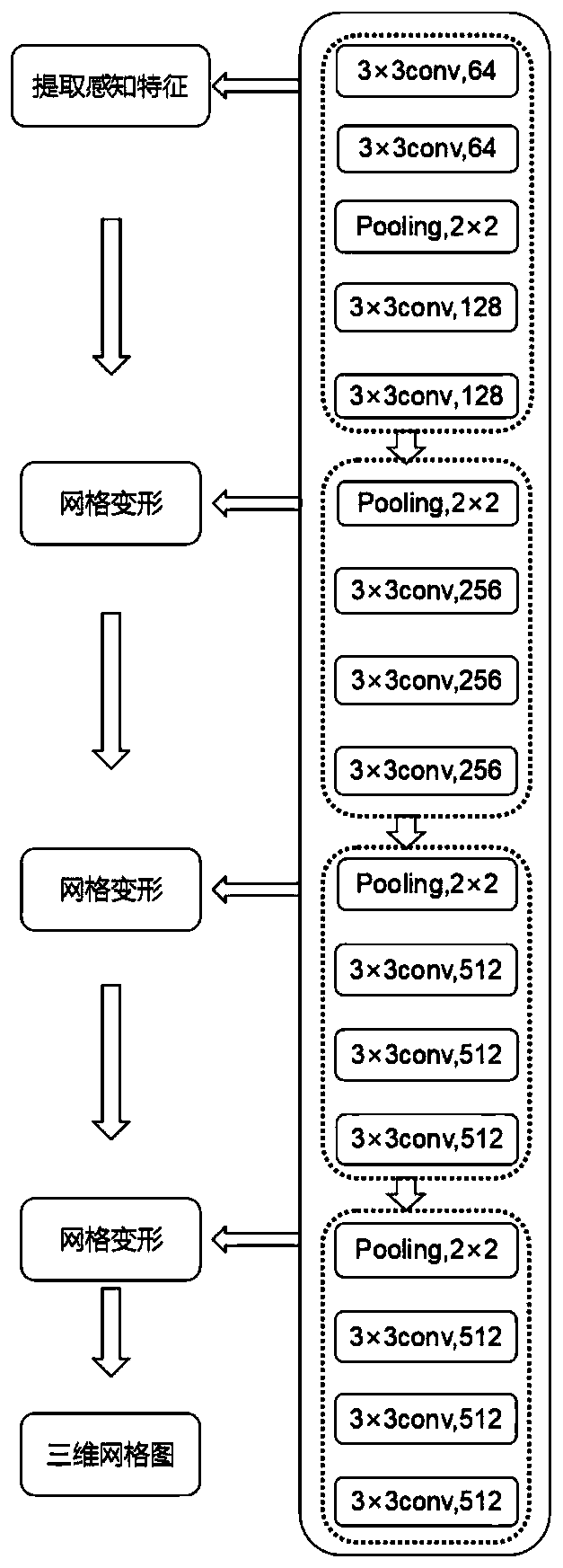
[0036] The two-dimensional image generation three-dimensional grid module is used to generate a three-dimensional grid image from the image of the monitoring area acquired by the camera monitoring module through the graph convolutional neural network when the drone recognition module recognizes that there is a drone in the monitoring area;
[0037] The ...
Embodiment 2
[0055] This embodiment provides a method for using the system described in Embodiment 1 to identify and locate the UAV, such as Figure 5 shown, including the following steps:
[0056] S1, the camera monitoring module is used to obtain images of the entire monitoring area;
[0057] S2. The UAV identification module receives the image of the monitoring area acquired by the camera monitoring module, matches with the pre-stored UAV image features, and identifies whether there is a UAV in the monitoring area;
[0058] S3. When the drone identification module recognizes that there is a drone in the monitoring area, the two-dimensional image generation three-dimensional grid module generates a three-dimensional grid image from the image of the monitoring area acquired by the camera monitoring module through the graph convolutional neural network; RGB_D The distance measurement and positioning module obtains the RGB_D image of the monitoring area through the binocular camera, and ca...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More