

Knee joint rehabilitation robot system and human-machine compliance control method thereof
A rehabilitation robot and interactive control technology, applied in the field of robotics, can solve problems such as weak assist, sudden change in control amount, and troublesome calibration, and achieve the effect of improving the assist effect.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0036] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
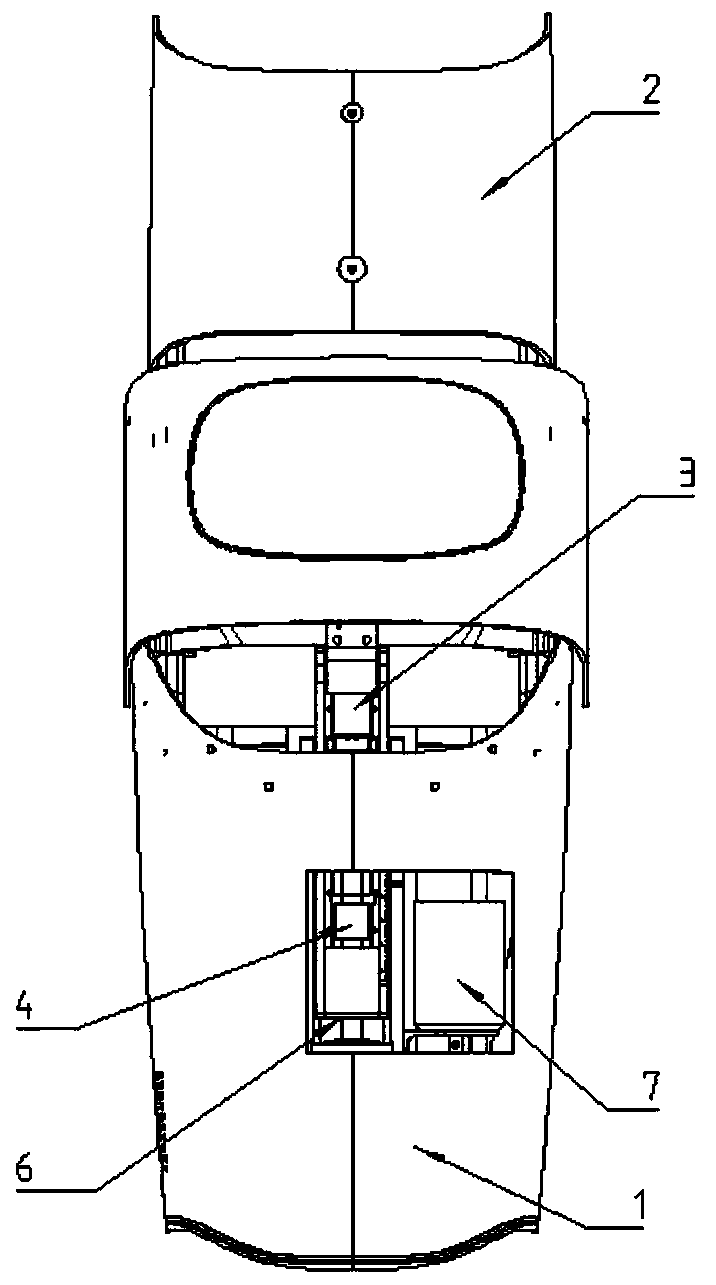
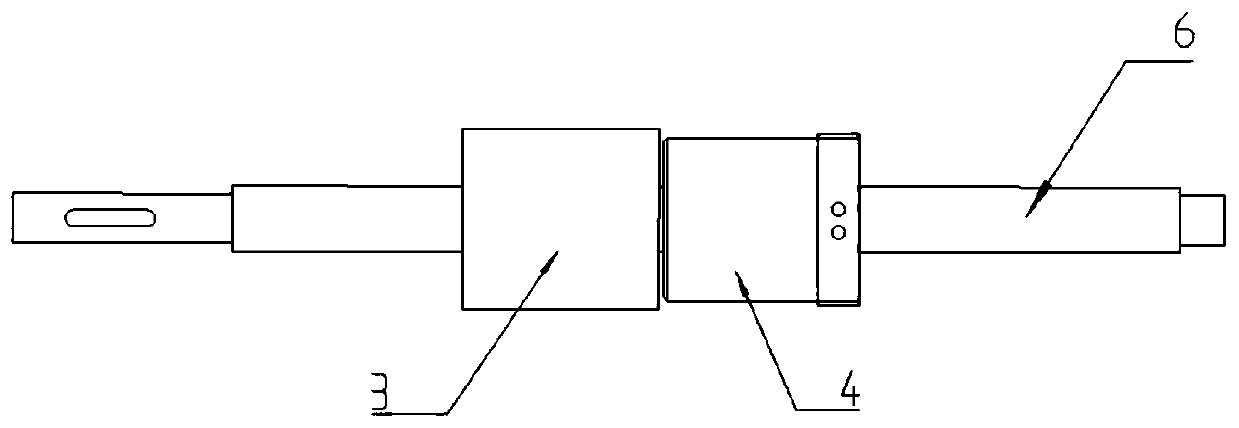
[0037] Such as figure 1 and figure 2 As shown, a knee joint rehabilitation robot system of the present invention can be used for rehabilitation training after being worn by the human body through proper binding. It includes a thigh rod 1, a calf rod 2, a motor 7 and a transmission system; the transmission system includes a load slider 3, a guide nut 4 and a lead screw 6; the motor 7 and the lead screw 6 are fixedly connected to the thigh rod 1, so The load slider 3 is fixedly connected to the calf rod 2; the motor 7 drives the guide nut 4 to move horizontally through the lead screw 6, and the guide nut 4 drives the calf rod 2 to move through the load slider 3. Because the moving direction of the load slider 3 has a corresponding relationship with the extension and flexion of the knee joint, for the convenience of description, the d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More