Reconfigurable hexapod robot device
A technology of hexapod robot and revolving joint, applied in the field of robotics, can solve problems such as poor climbing ability, low carrying capacity, and insufficient obstacle-crossing ability, and achieve improved walking stability, wide application range, and strong carrying capacity. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
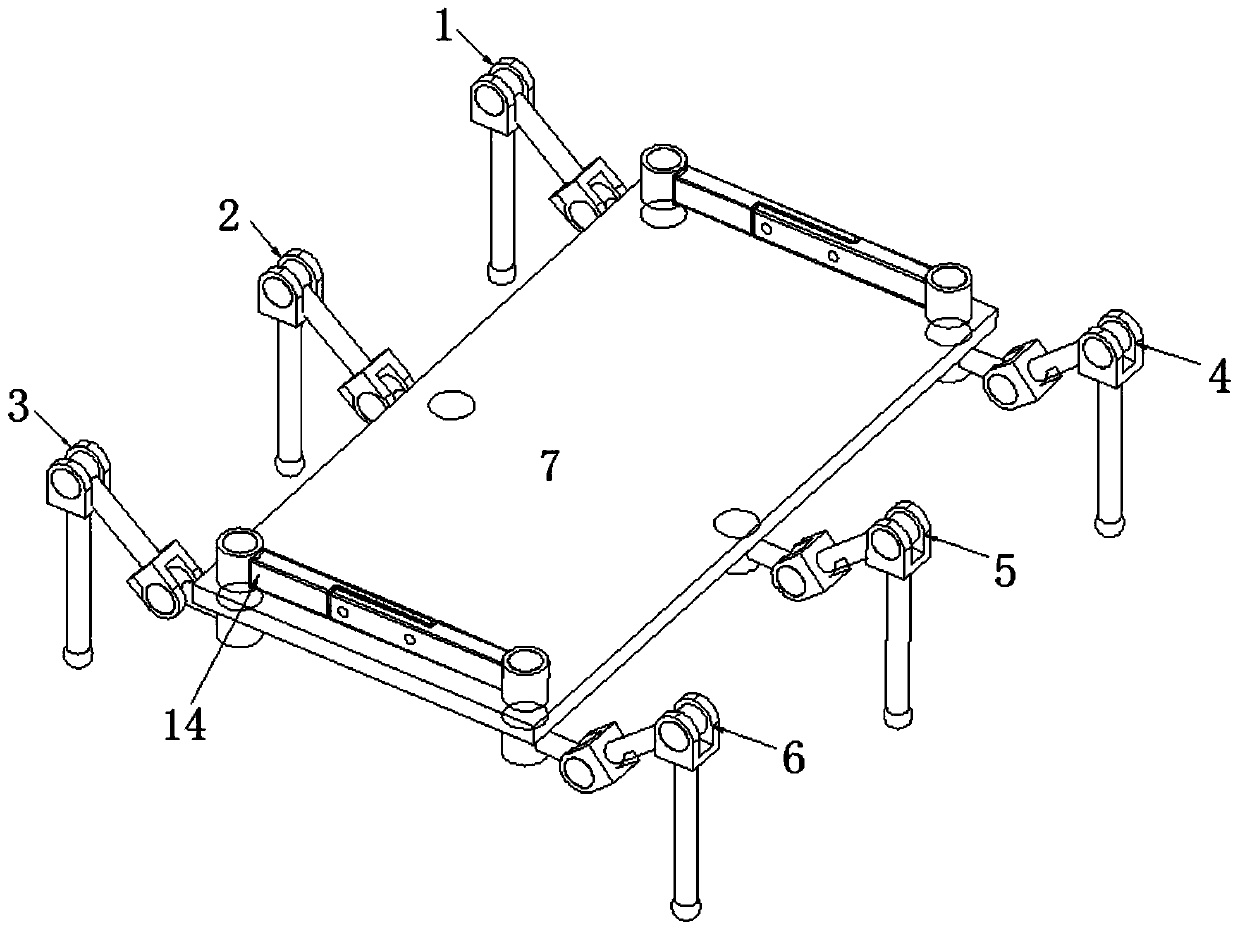
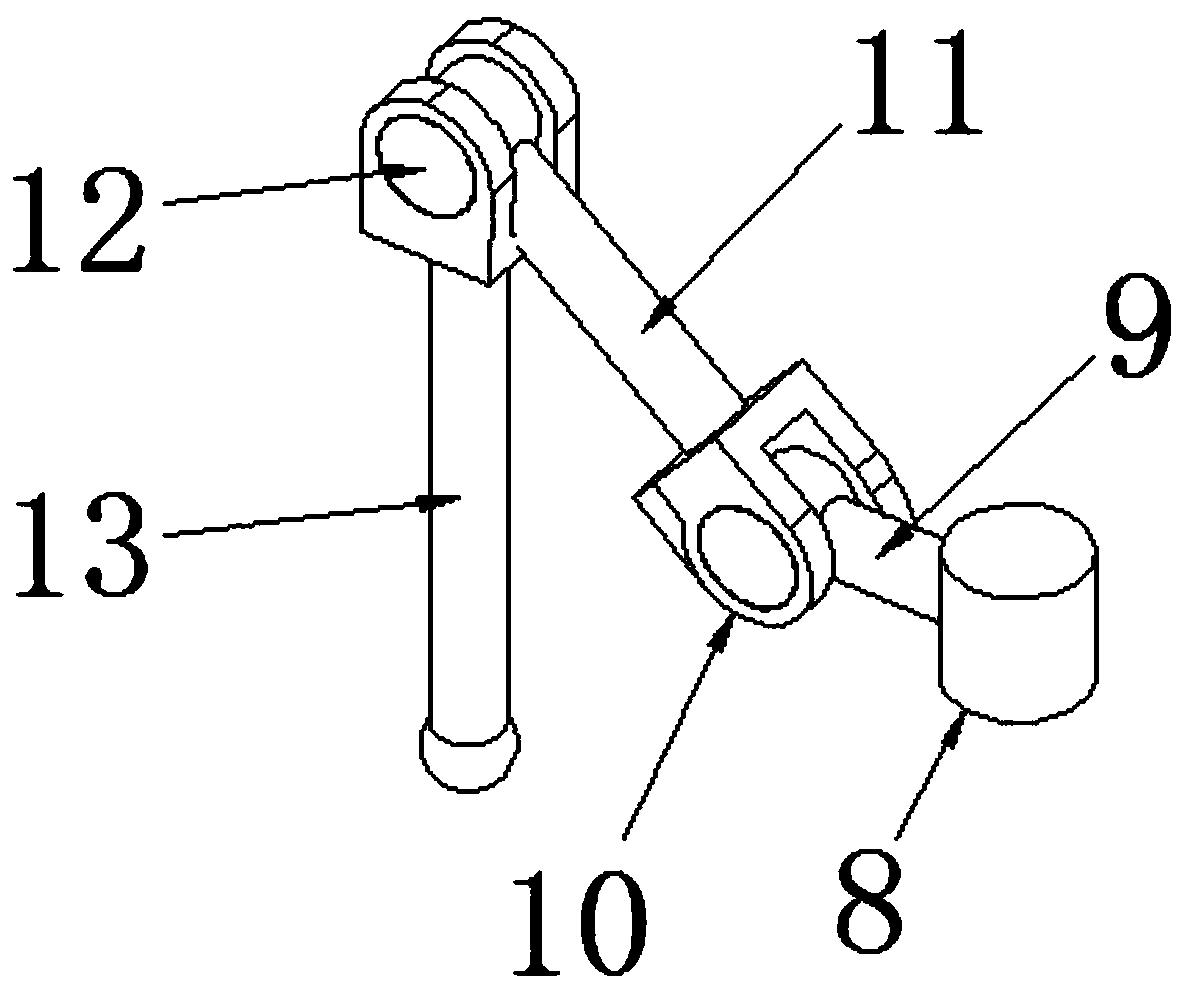
[0022] Embodiment 1, see Figure 1-Figure 3 , a reconfigurable hexapod robot device, including left front leg 1, left middle leg 2, left rear leg 3, right front leg 4, right middle leg 5, right rear leg 6 and body 7, wherein: left front leg 1, left Middle leg 2, left rear leg 3, right front leg 4, right middle leg 5 and right rear leg 6 are fixedly installed around the bottom of body 7, left front leg 1, left middle leg 2, left rear leg 3, right front leg 4, right middle The leg 5 and the right rear leg 6 have the same structure, and the left rear leg 3 includes the first rotating pair 8, the connecting rod 9, the second rotating pair 10, the thigh 11, the third rotating pair 12 and the shank 13, and the fixed end of the first rotating pair 8 Fixedly installed at the bottom corner of the body 7, the movable end of the first rotating pair 8 is fixedly connected to one end of the connecting rod 9, the other end of the connecting rod 9 is fixedly connected to one end of the secon...
Embodiment 2
[0030] Example 2, see Figure 4 , a reconfigurable hexapod robot device, wherein: the typical walking gaits of a hexapod robot include triangular gait, quadruped gait and wave gait, and the working principle of its walking is described in triangular gait: the left front leg 1. The left rear leg 2 and the right middle leg 5 do not move, and the lower legs 13 on the left middle leg 2, the right front leg 4 and the right rear leg 6 are respectively lifted up through the third revolving pair 12 and the second revolving pair 10, and the left middle leg The first rotary pair 8 on the leg 2, the right front leg 4 and the right rear leg 6 rotates at the same angle respectively, and is at a certain angle with the body 7, and the shank 13 on the left middle leg 2, the right front leg 4 and the right rear leg 6 passes through the The three rotating pairs 12 and the second rotating pair 10 move down to contact with the ground, the lower leg 13 on the left front leg 1, the left rear leg 2 ...
Embodiment 3
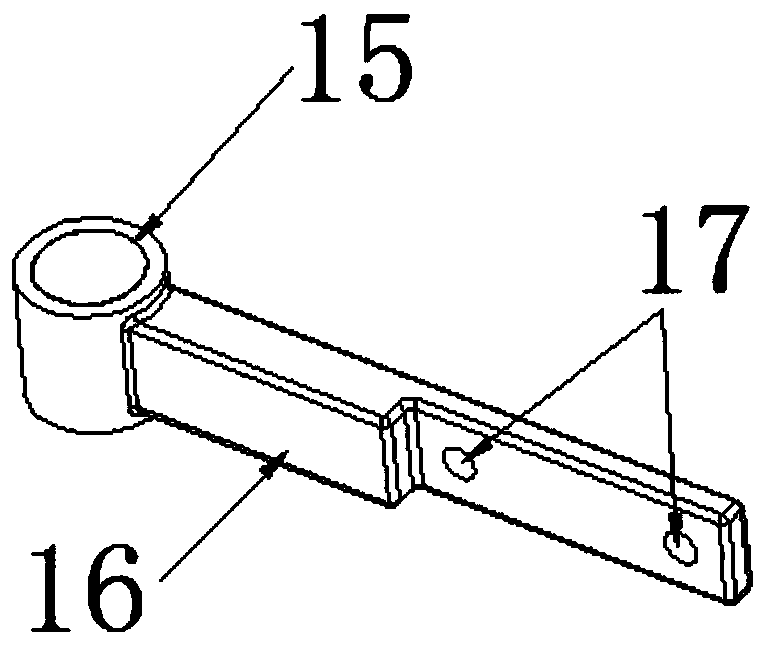
[0032] Example 3, see Figure 5 , a reconfigurable hexapod robot device, the left rear connector and the right rear connector to be connected to the reconfigurable hexapod robot body 7-1 are connected to the reconfigurable hexapod robot body 7-2 The left front connector, the left rear connector, the right front connector, and the right rear connector are to be connected to the left front connector and the right front connector on the body 7-3 of the reconfigurable hexapod robot respectively around the respective fourth rotation pairs in 15 directions. After external rotation of 90°, it is fixed, and then the left front connector, right front connector, left rear connector, and right rear connector on the body 7-2 of the reconfigurable hexapod robot to be connected are respectively connected to the reconfigurable hexapod robot to be connected. The left rear connector and the right rear connector on the body 7-1 are connected with the left front connector and the right front con...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap