

Deforming wheel mechanism for stair climbing robot
A technology of deformed wheels and robots, which is applied in the directions of wheels, motor vehicles, transportation and packaging, etc. It can solve problems such as difficult to maintain deformed posture, unable to complete ladder climbing, low application value, etc., to solve stability problems and low cost , the effect of increasing value
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
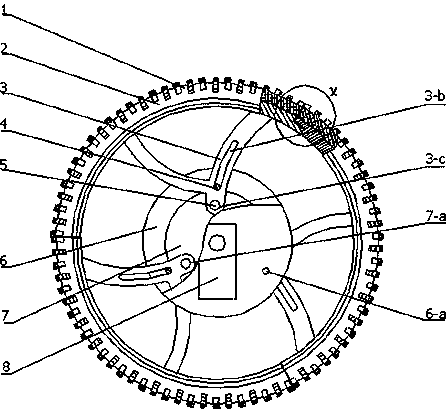
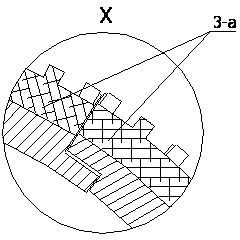
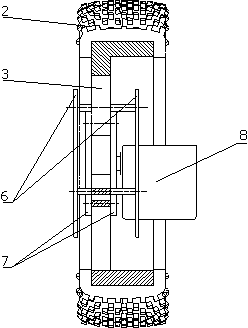
[0007] Such as figure 1 , 2 , 3, the described deformed wheel mechanism for the ladder climbing robot includes 3 sets of identical arc wheels 1, and each set of arc wheels 1 includes an arc tire 2, a curved triangular hub 3, and an outer disk Sliding shaft 4, inner disc rotating shaft 5, described deformation wheel mechanism also includes outer disc 6, inner disc 7, steering gear 8, described curved triangular hub 3 outer edge is provided with L-shaped lap edge 3-a, described curve The outer edge of the triangular hub 3 is provided with an arc-shaped tire 2, and the hub 3 is provided with a sliding groove 3-b and a connecting hole 3-c; the two inner discs 7 are respectively provided with three connecting holes 7-a; the two outer discs 6 are respectively provided with There are three connection holes 6-a.
[0008] The present invention is a deformed wheel mechanism formed by utilizing the kinematic characteristics of the slider crank mechanism. Three outer disk sliding shaft...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More