

Passage path planning method, device, equipment and readable storage medium
A technology of paths and passage areas, applied in control devices, two-dimensional position/channel control, transportation and packaging, etc., can solve the problems of increasing unreachable paths, reducing the speed of planning for passing paths, and increasing the amount of calculation for planning of passing paths, etc. To achieve the effect of reducing the amount of calculation and improving the planning speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
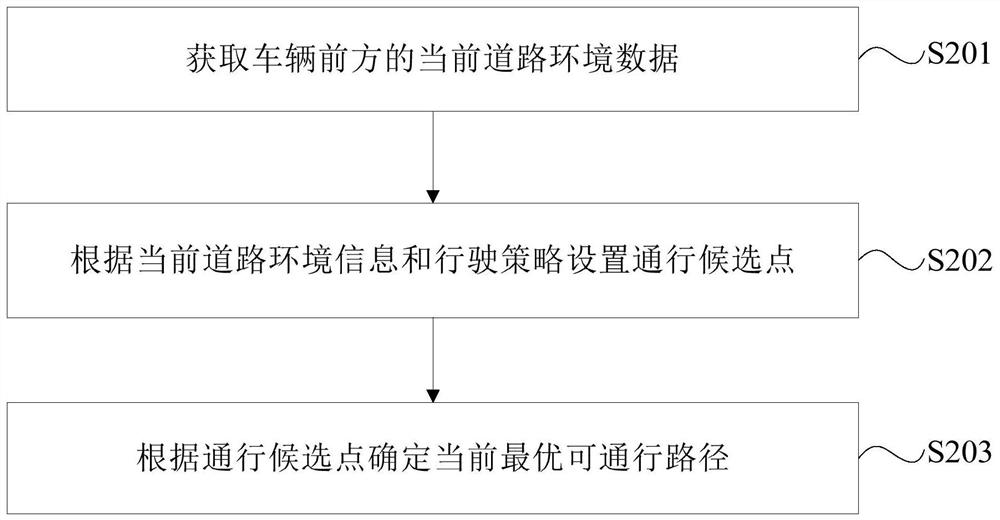
[0030] figure 2 A process diagram of a planning method for the general path provided by the embodiment of the present application, such as figure 2 As shown, the execution body of the present application is a planning device of the general path, which can be integrated into an electronic device, and the electronic device can be located in a unmanned vehicle. The planning method of the general path provided in this embodiment includes the following steps.
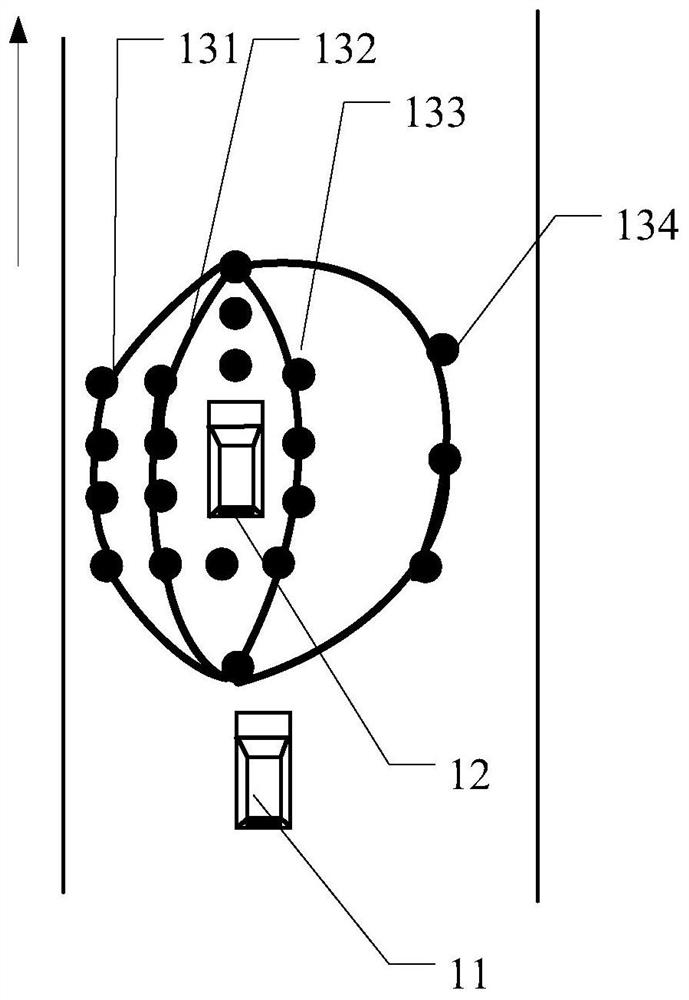
[0031] Step 201, obtain the current road environment data in front of the vehicle.
[0032] Specifically, in the present embodiment, a perceptual apparatus is provided on the drone, and the perceptual means may be a video acquisition device, a laser radar device, and the like, a sense device collects the current road environment data in front of the vehicle, and a general path planning device from a perceptual device. Get the current road environment data in front of the vehicle.
[0033] Among them, the current road environmen...
Embodiment 2
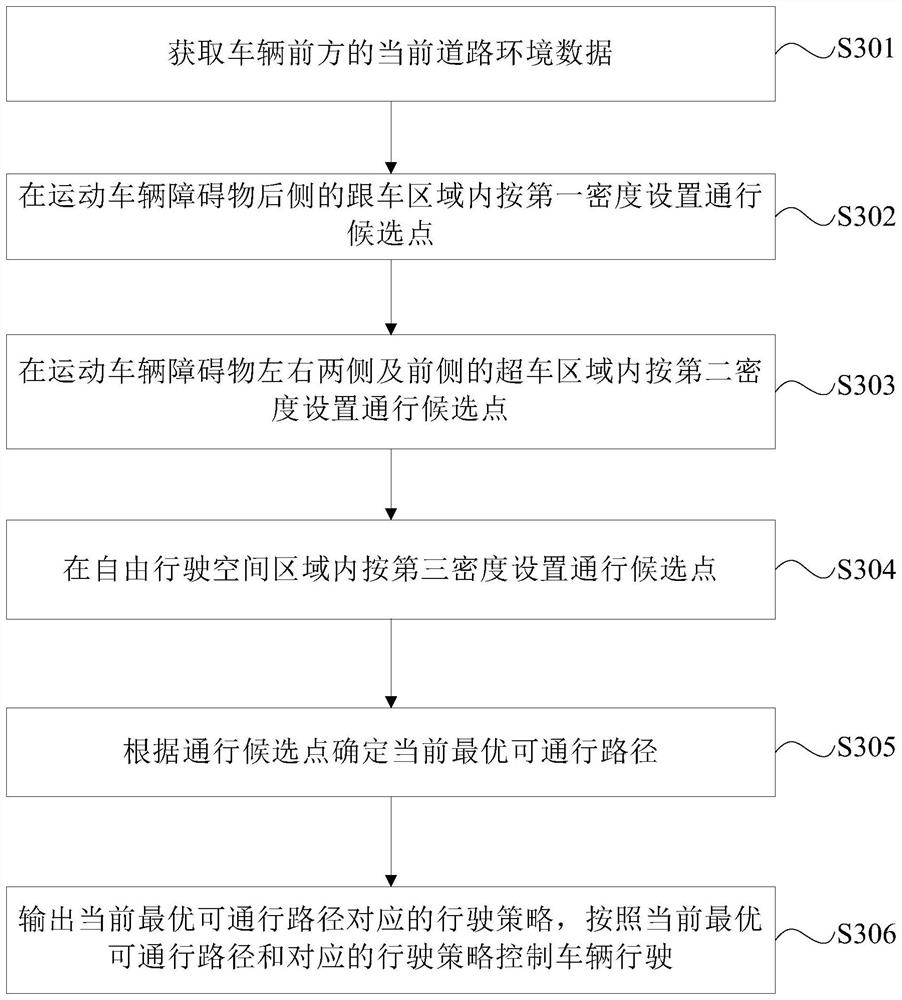
[0042] image 3 A flow chart of the planning method of the general path provided by the second embodiment of the present application, such as image 3 As shown, the planning method of the general path provided in this embodiment is based on the planning method of the general path provided by the first embodiment of the present application, and further refinement of step 201 - Step 203, and also includes output current most The travel policy corresponding to the excellent pass path; the step of controlling the vehicle in accordance with the current optimal accessible path and the corresponding travel policy, the planning method of the general path provided in the present embodiment includes the following steps.
[0043] Step 301 get the current road environment data in front of the vehicle.
[0044] Further, in the present embodiment, the current road environment data includes: motion vehicle obstacle information and the vehicle line information.
[0045] Specifically, obstacle info...
Embodiment 3
[0079] Image 6 The method of the present application programming flowchart passage path according to a third embodiment, such as Image 6 , The traffic path planning method provided in this embodiment, in the present embodiment based application programming method according to a first path passing on further refinement step and step 201- 203, the present embodiment provides the access path planning method comprises the following steps.
[0080] Step 601, acquiring environmental data current road ahead of the vehicle.
[0081] Further, in this embodiment, current road environment data comprises: the motion information of the obstacle and the vehicle lane line information.
[0082] Step 602, determine a current road environment information can be based on the current traffic area.
[0083] Further, in this embodiment, Figure 7 The present application programming flowchart 602 of method steps traffic path according to a third embodiment, such as Figure 7 As shown in this embodiment, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More