

A large-scale unmanned aerial vehicle rapid grouping method for disaster rescue tasks
A UAV, large-scale technology, applied in the research field of UAV marshalling, can solve the problem that UAVs cannot meet the needs of complex rescue tasks, avoid the imbalance of UAV resources, reduce computing costs, and achieve real-time performance. and the effect of the validity guarantee
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The present invention will be described in detail below with reference to the accompanying drawings and examples.
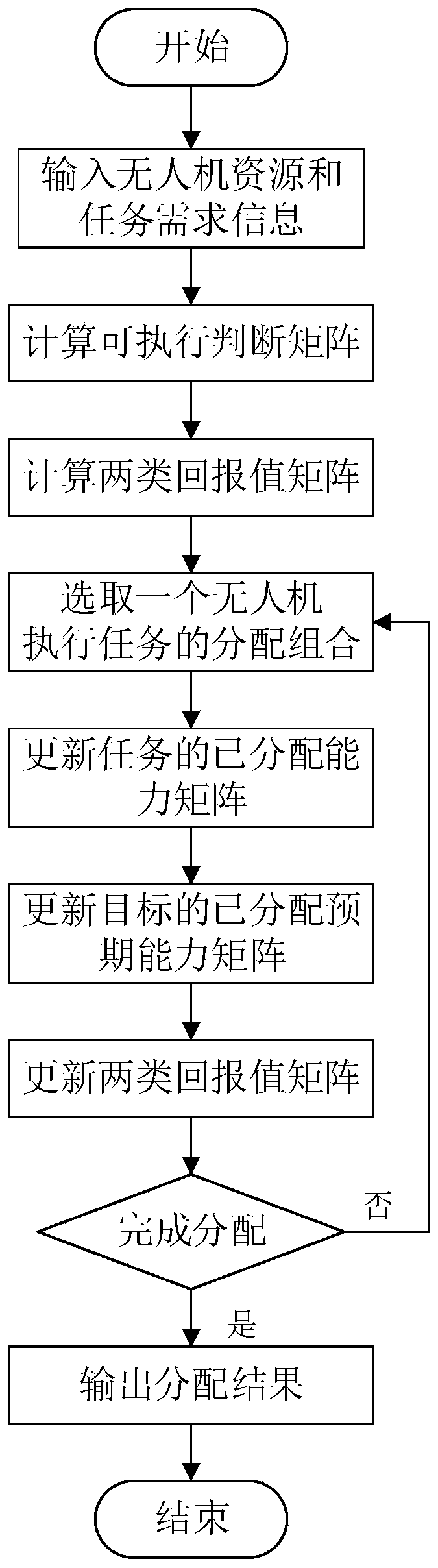
[0034] The invention provides a large-scale unmanned aerial vehicle rapid grouping method oriented to disaster rescue tasks. This method is based on the resource requirements of rescue missions and the two types of indicators of task urgency and problems under the premise of considering the constraints of the ability of UAVs to perform tasks and the constraints that the same UAV can only perform one task at the same time. The drones are grouped and assigned to multiple rescue missions within the rescue area. The two types of indicators for the problem are, respectively, maximizing the completion rate of the task and maximizing the coverage rate of the task. Maximizing the completion rate of the task refers to the sum of the proportions of each assigned UAV group that can meet the corresponding task requirements. Maximizing mission coverage means assignin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More