

Mechanical dexterous gripper driven by linear ultrasonic motor
A linear ultrasonic motor and dexterous hand technology, applied in the field of robotics, can solve problems such as large volume and complex structure of mechanical fingers, and achieve high power density, good market application value, and good overall performance.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
[0023] Such as Figure 1-6 shown.
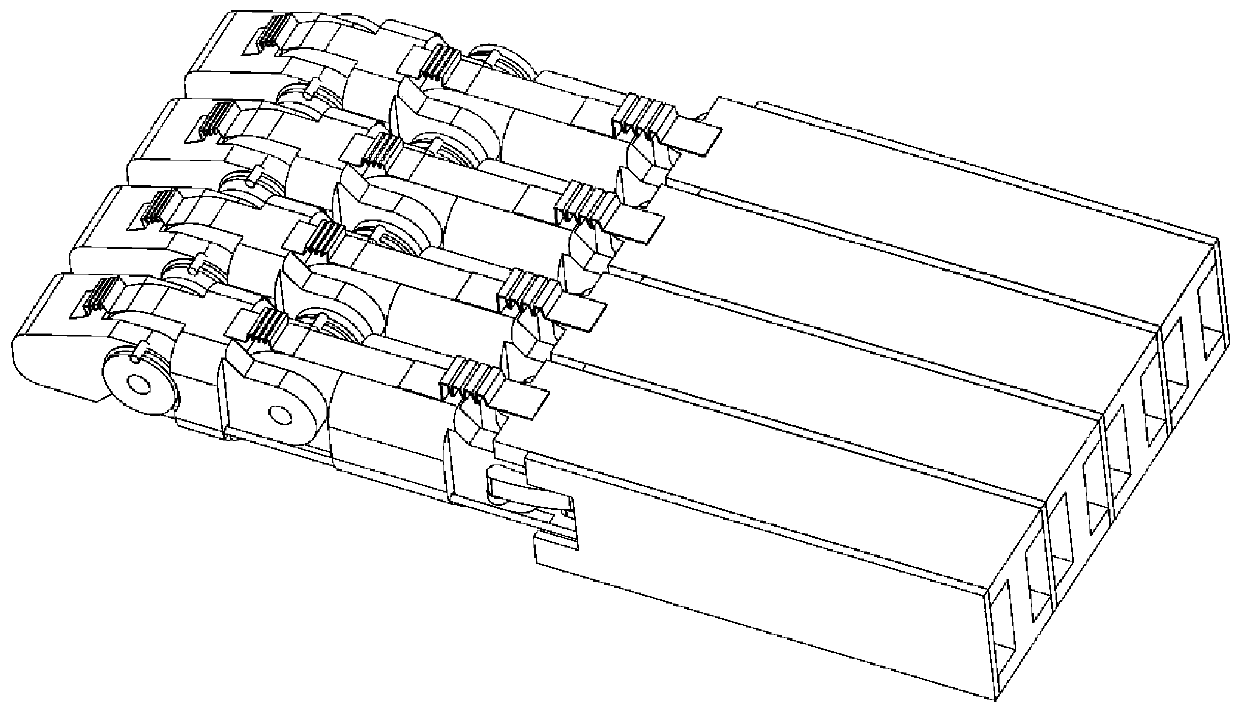
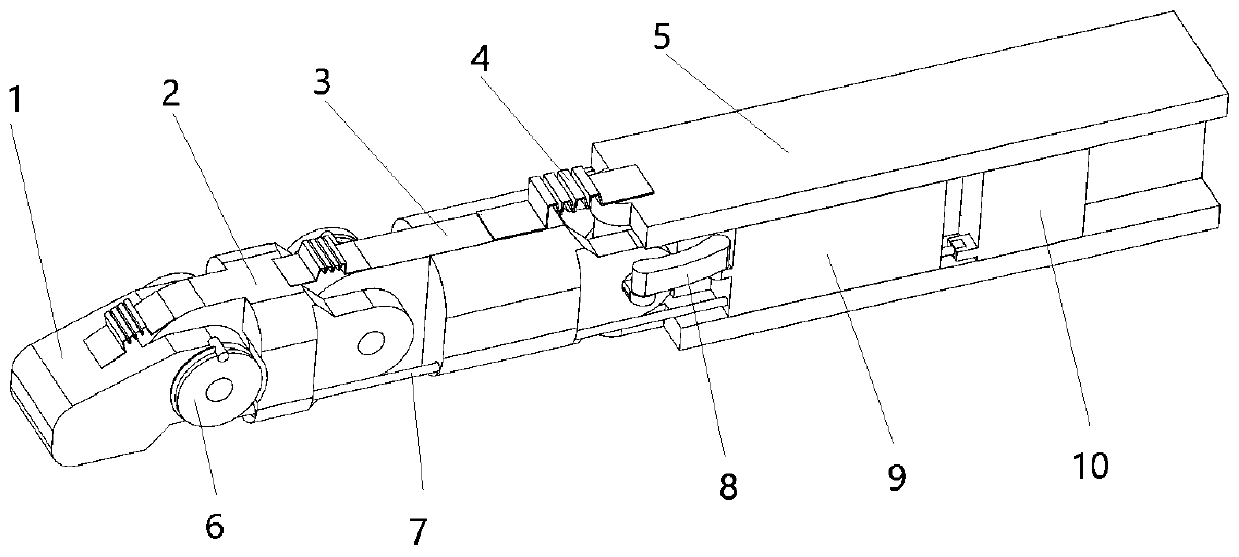
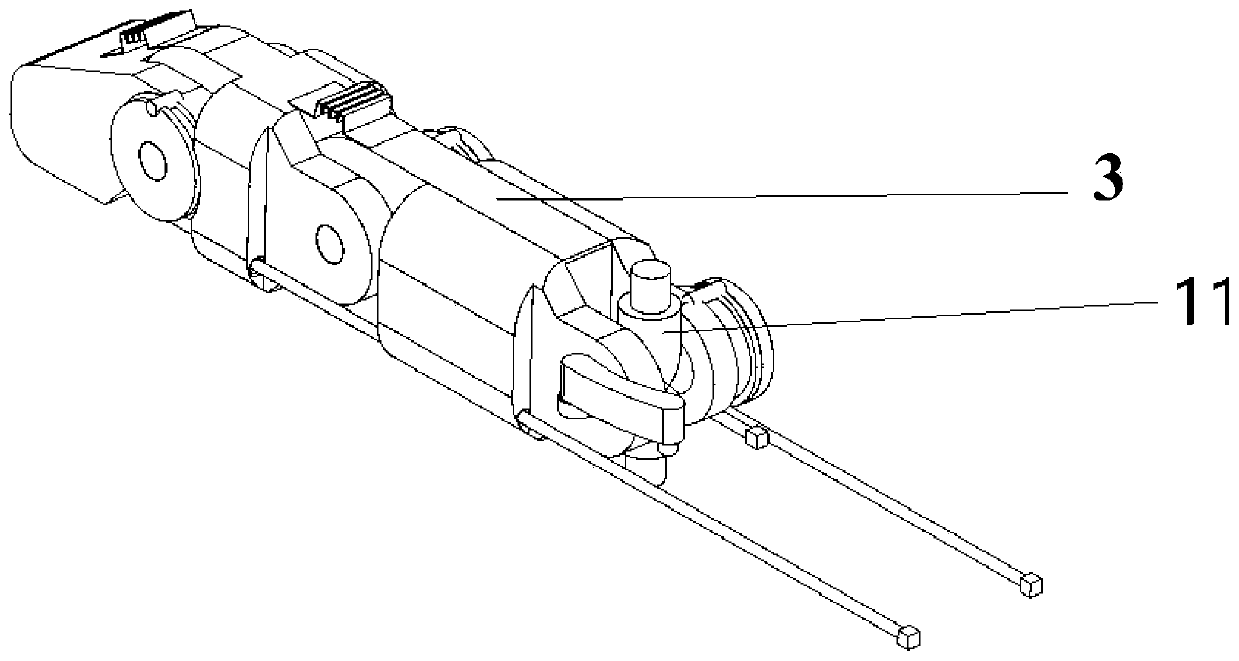
[0024] A mechanical dexterous hand driven by a linear ultrasonic motor, the overall structure is as follows figure 1 As shown, each finger includes a motor installation channel 5, front phalanx 1, middle phalanx 2 and root phalanx 3, such as figure 2 As shown, the root knuckle 3 is connected with the motor installation channel 5 through the Hooke hinge 11 ( image 3 ), the middle knuckle 2 is hinged to the root knuckle 3, the front knuckle 1 is hinged to the middle knuckle 2, between the root knuckle 3 and the motor installation channel 5, between the middle knuckle 2 and the root knuckle 3, and the front knuckle Back-moving spring 4 is installed between joint 1 and middle knuckle 2, and front knuckle 1, middle knuckle 2 and root knuckle 3 are all connected with drive wheels, and each drive wheel is installed on t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More