

A multi-target tracking method and system
A multi-target tracking and target technology, applied in the field of multi-sensor information fusion
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
no. 1 example
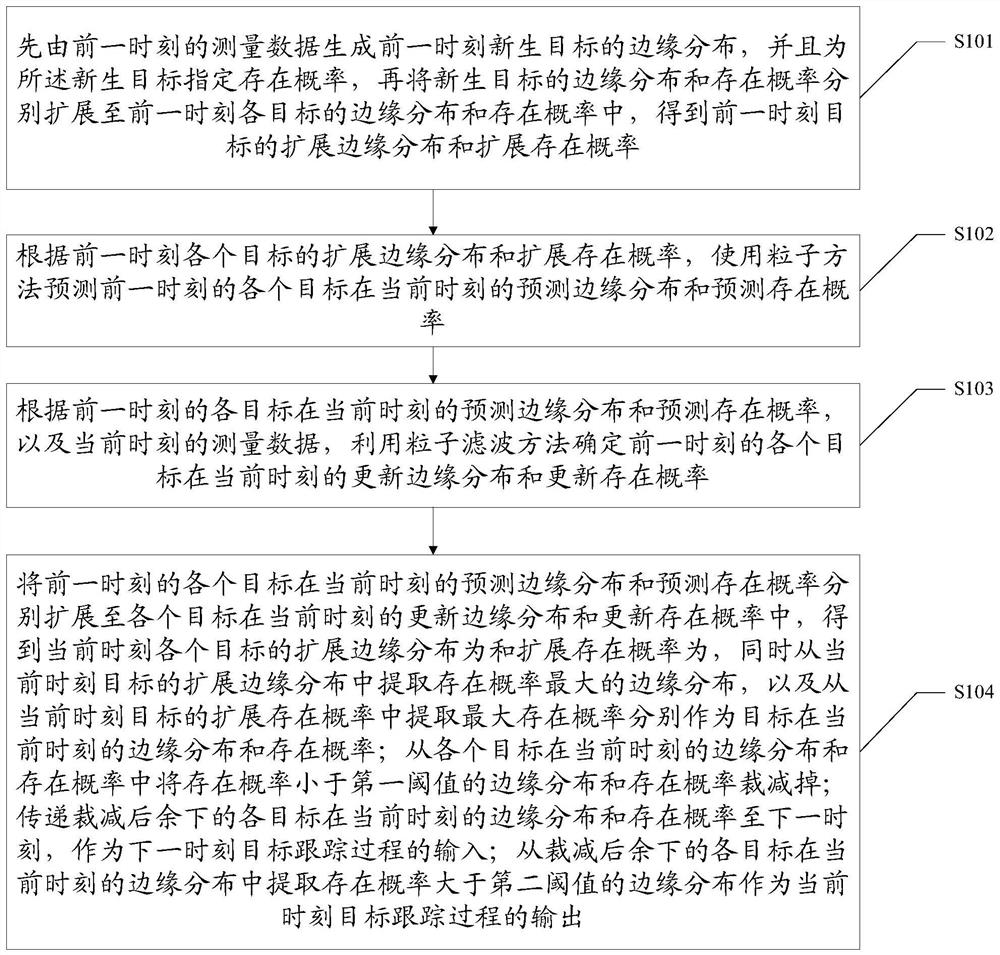
[0024] In order to effectively solve the multi-target tracking problem in the nonlinear non-Gaussian system, the first embodiment of the present application proposes a multi-target tracking method, see figure 1 , the multi-target tracking method includes:
[0025] Step 101. First generate the marginal distribution of the newborn target at the previous moment from the measurement data at the previous moment, and specify the existence probability for the newborn target, and then extend the marginal distribution and existence probability of the newborn target to the previous time respectively. In the marginal distribution and the existence probability, the extended marginal distribution and the extended existence probability of the target at the previous moment are obtained;
[0026] Optionally, k-1 time represents the previous time, k time represents the current time, and the measurement data j at k-1 time is expressed as y j,k-1 =[r j,k-1 θ j,k-1 ] T , where j=1,...,C', r ...
no. 2 example
[0053] In order to solve the problems existing in the prior art, the second embodiment of the present application provides a multi-target tracking system, such as figure 2 As shown, the multi-target tracking system includes:
[0054] The newborn target generation and expansion module 201 is used to generate the marginal distribution of the newborn target at the previous moment from the measurement data at the previous moment, and specify the existence probability for the newborn target, and then expand the marginal distribution and the existence probability of the newborn target to From the marginal distribution and existence probability of each target at the previous moment, the extended marginal distribution and extended existence probability of the target at the previous moment are obtained;
[0055] Optionally, k-1 time represents the previous time, k time represents the current time, and the measurement data j at k-1 time is expressed as y j,k-1 =[r j,k-1 θ j,k-1 ] ...
no. 3 example
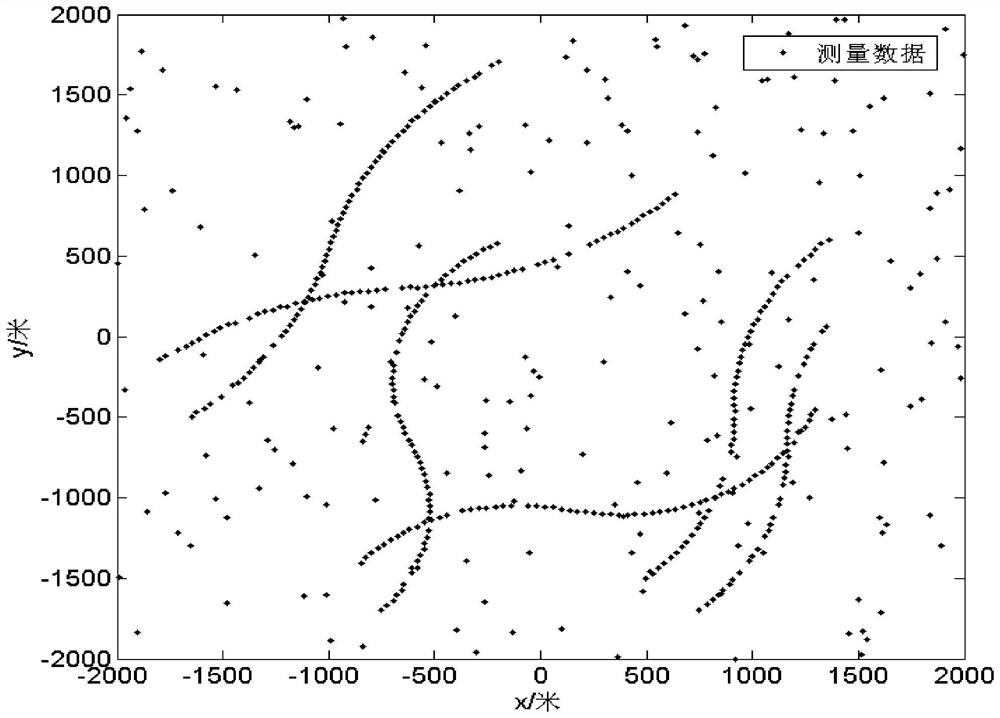
[0066] On the basis of the multi-target tracking method in Embodiment 1, this embodiment combines the Figure 3-6 The multi-target tracking method in two-dimensional space is described with an example. In this embodiment, it is assumed that the sensor is a radar, but it can be understood that in practice, the sensor can also be other types of sensors.
[0067] see Figure 3-5 , the two-dimensional space in this embodiment is [-2000(m), 2000(m)]×[-2000(m), 2000(m)], this embodiment is based on the multi-target tracking method of the first embodiment, It can track moving objects in space. Optionally, in two-dimensional space, the state vector of the target is composed of position, speed and turning rate, and the state vector is expressed as Where x and y respectively represent the position components of the target in the Cartesian coordinate system, and Respectively represent the velocity component of the target in the Cartesian coordinate system, ω represents the turning...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More