Drone group anti-collision control method and device and computer readable storage medium
A control method and unmanned aerial vehicle technology, applied in the field of computer-readable storage media and unmanned aerial vehicle swarm anti-collision control, can solve the problems of large amount of relative position calculations, unsuitable for formation tasks, etc., and achieve the effect of simple control method
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
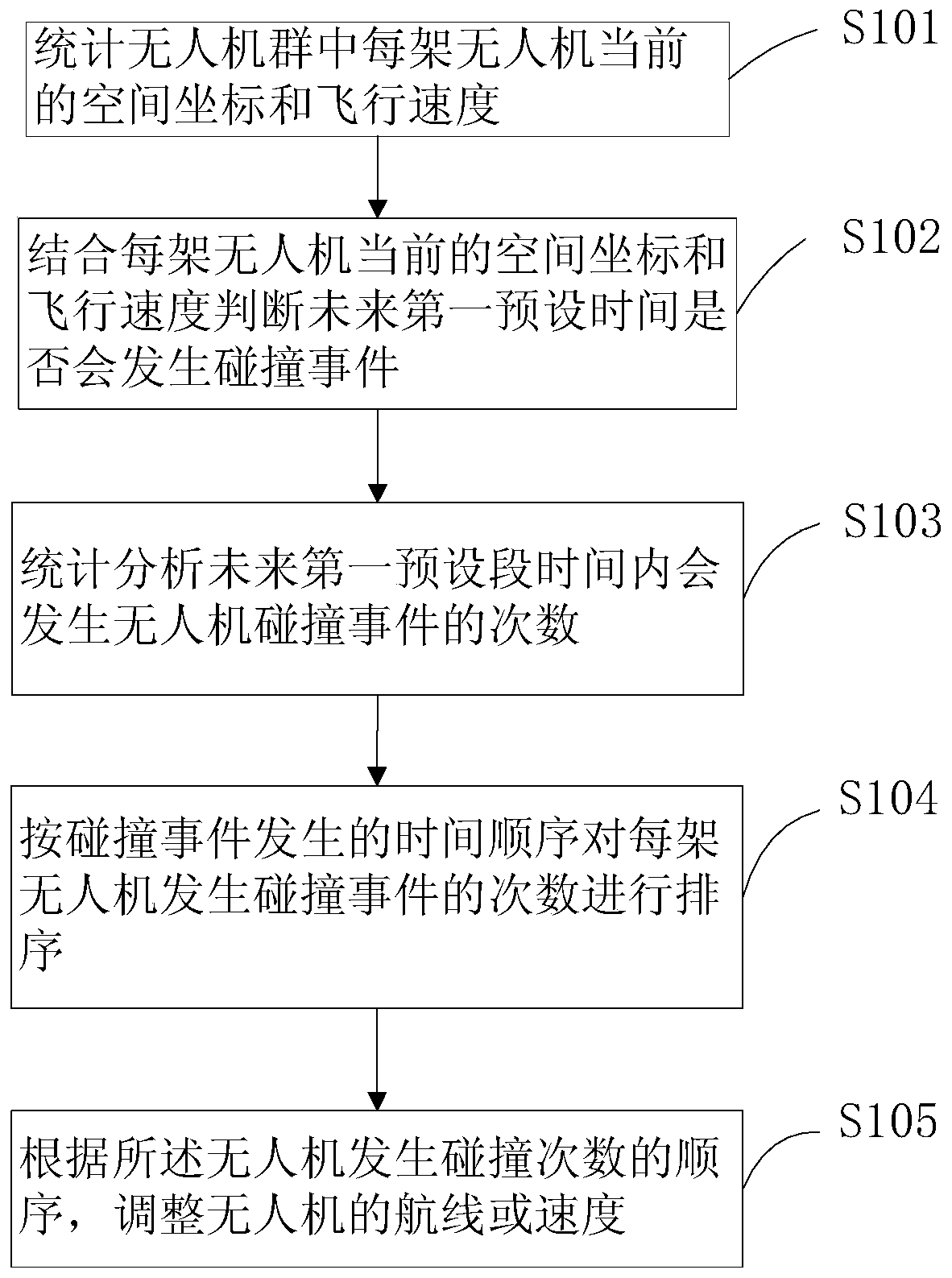
[0043] like figure 1 As shown, Embodiment 1 of the present invention provides a method for anti-collision control of UAV swarms, the method comprising:
[0044] S101, counting the current space coordinates and flight speed of each drone in the drone group;
[0045] The current space coordinates and flight speed of each flying UAV in the UAV group are counted in the same coordinate system, and the flight direction and flight speed can be obtained through the flight speed.
[0046] S102. Combining the current space coordinates and flight speed of each drone to determine whether a collision event will occur at the first preset time in the future;
[0047] The first preset time can be 1 second, 2 seconds or 3 seconds, etc., which can be set according to needs, and is not specifically limited here. If the distance between the drones is small or / and the flying speed is fast, the first time setting is small, and vice versa. It can be understood that, in this step, if it is judged ...
Embodiment 2
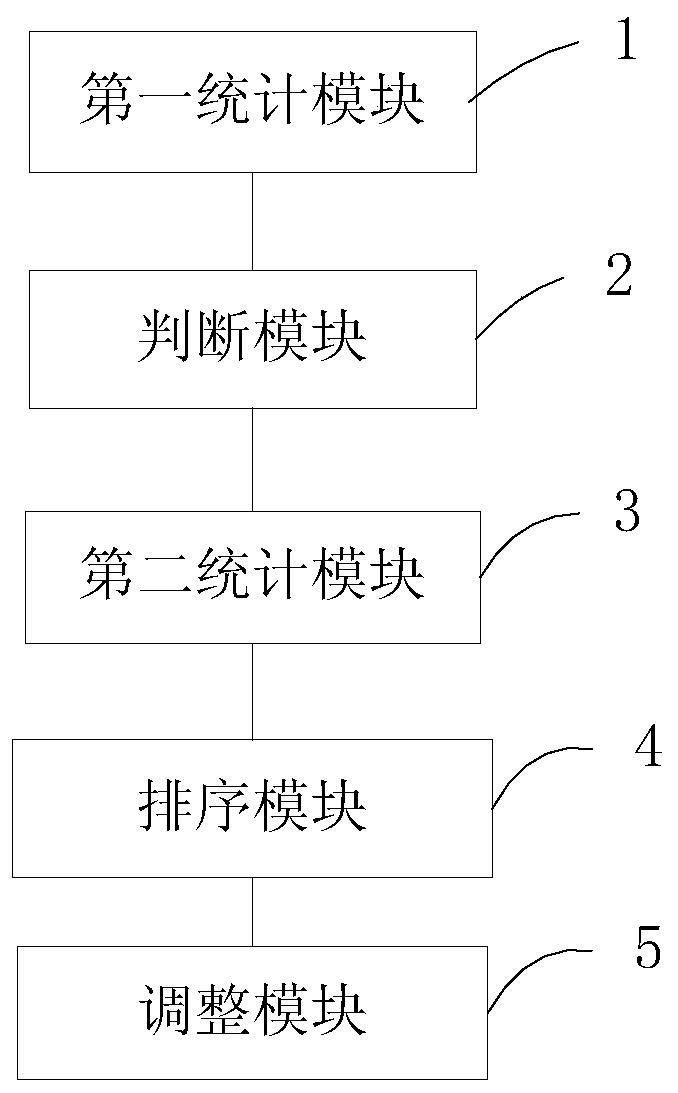
[0085] like image 3 As shown, Embodiment 2 of the present invention provides a UAV swarm anti-collision control device, which includes:
[0086] The first statistics module 1 is used to count the current space coordinates and flight speed of each drone in the drone group;
[0087] Judgment module 2, used to combine the current space coordinates and flight speed of each drone to judge whether a collision event will occur at the first preset time in the future;
[0088] The second statistical module 3 is used for statistical analysis of the number of UAV collision events that will occur within the first preset period of time in the future;
[0089] Sorting module 4, is used for sorting the number of times of collision events of each UAV according to the chronological order of collision events;
[0090] The adjustment module 5 is used to adjust the route or speed of the UAV according to the order of the collision times of the UAV.
[0091] The present invention calculates the...
Embodiment 3
[0093] Based on the above embodiments, the present invention also provides a computer-readable storage medium, the computer-readable storage medium stores one or more programs, and the one or more programs can be executed by one or more processors, to achieve the following steps:
[0094] Count the current space coordinates and flight speed of each drone in the drone group;
[0095] Combining the current space coordinates and flight speed of each drone to judge whether a collision event will occur at the first preset time in the future;
[0096] Statistical analysis of the number of drone collisions that will occur within the first preset period of time in the future;
[0097] Sort the number of collision events for each drone in chronological order;
[0098] According to the sequence of collision times of the drones, the route or speed of the drones is adjusted.
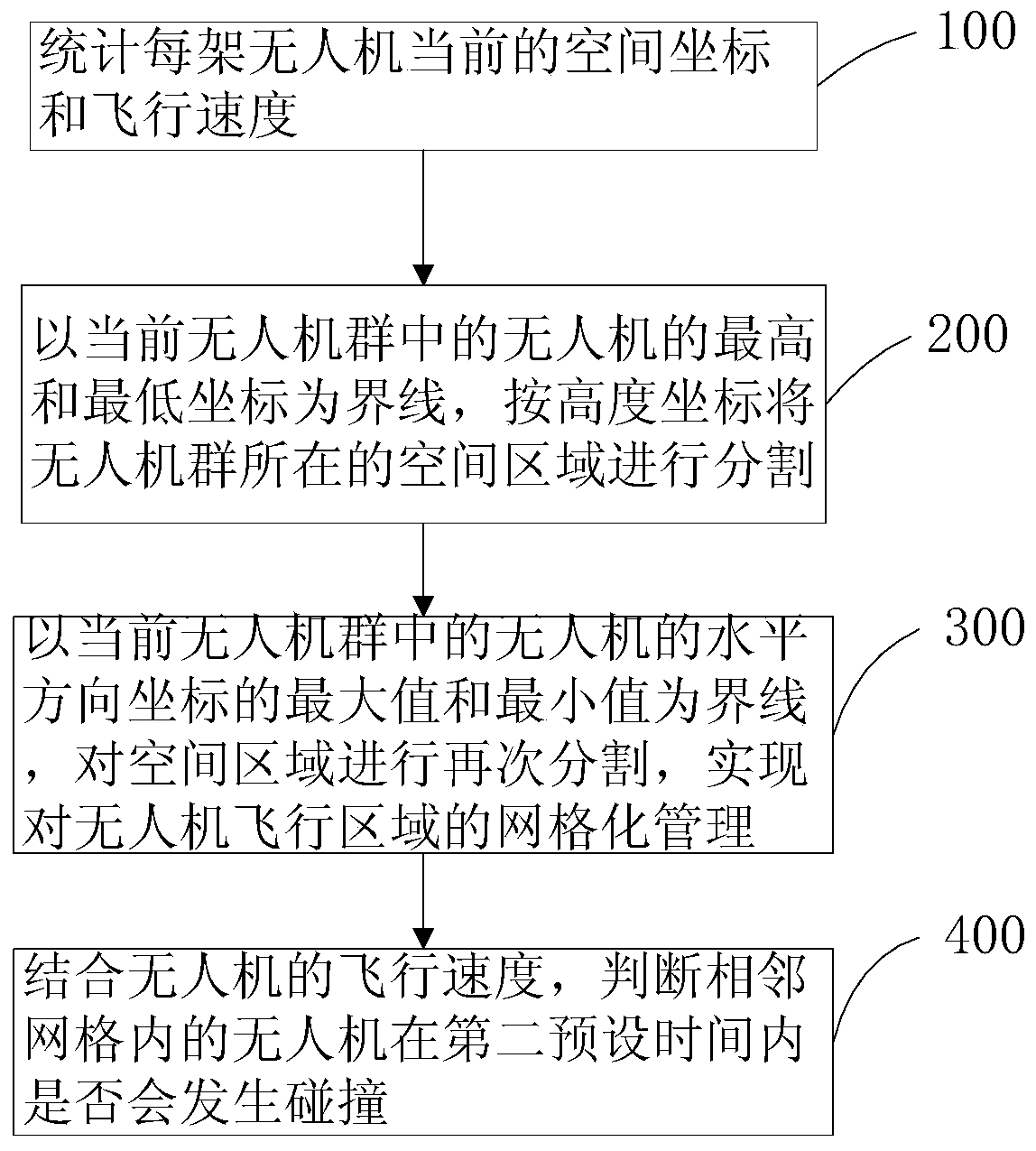
[0099] In a preferred embodiment, in the method for judging whether a collision event will occur at a first pr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More