

Reducing wind power blade endoscopic detection robot
A technology of wind turbine blades and robots, which is applied in the field of robots, can solve the problems of not being able to adapt to curvature changes and small diameter changing ranges, and achieve the effect of stabilizing the ability to change diameters in a large range
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
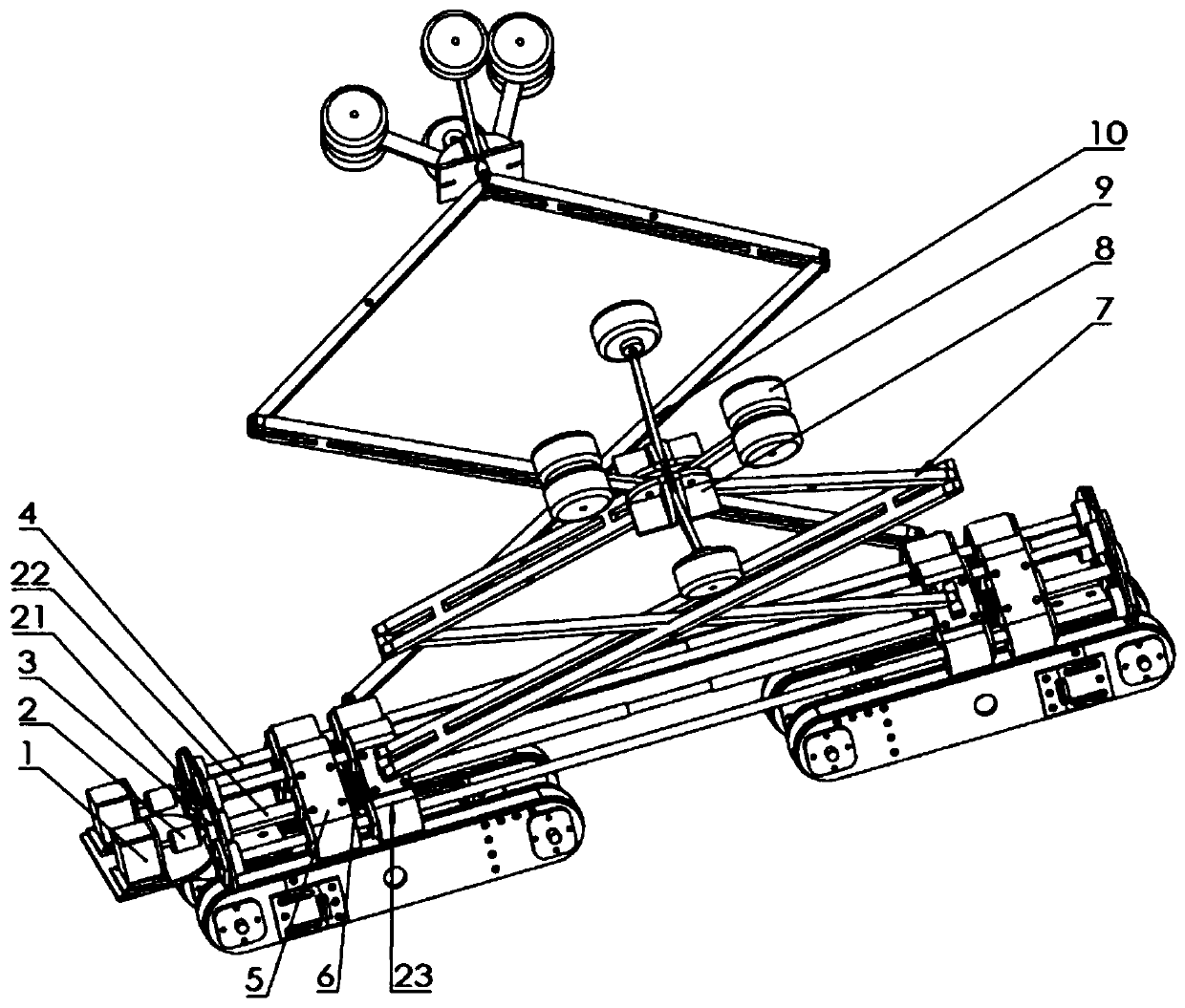
[0044] In this embodiment, the variable-diameter wind power blade endoscopic inspection robot is composed of a walking mechanism, a diameter-changing mechanism, a support mechanism, and a control part. Movement and various parts perform corresponding actions;
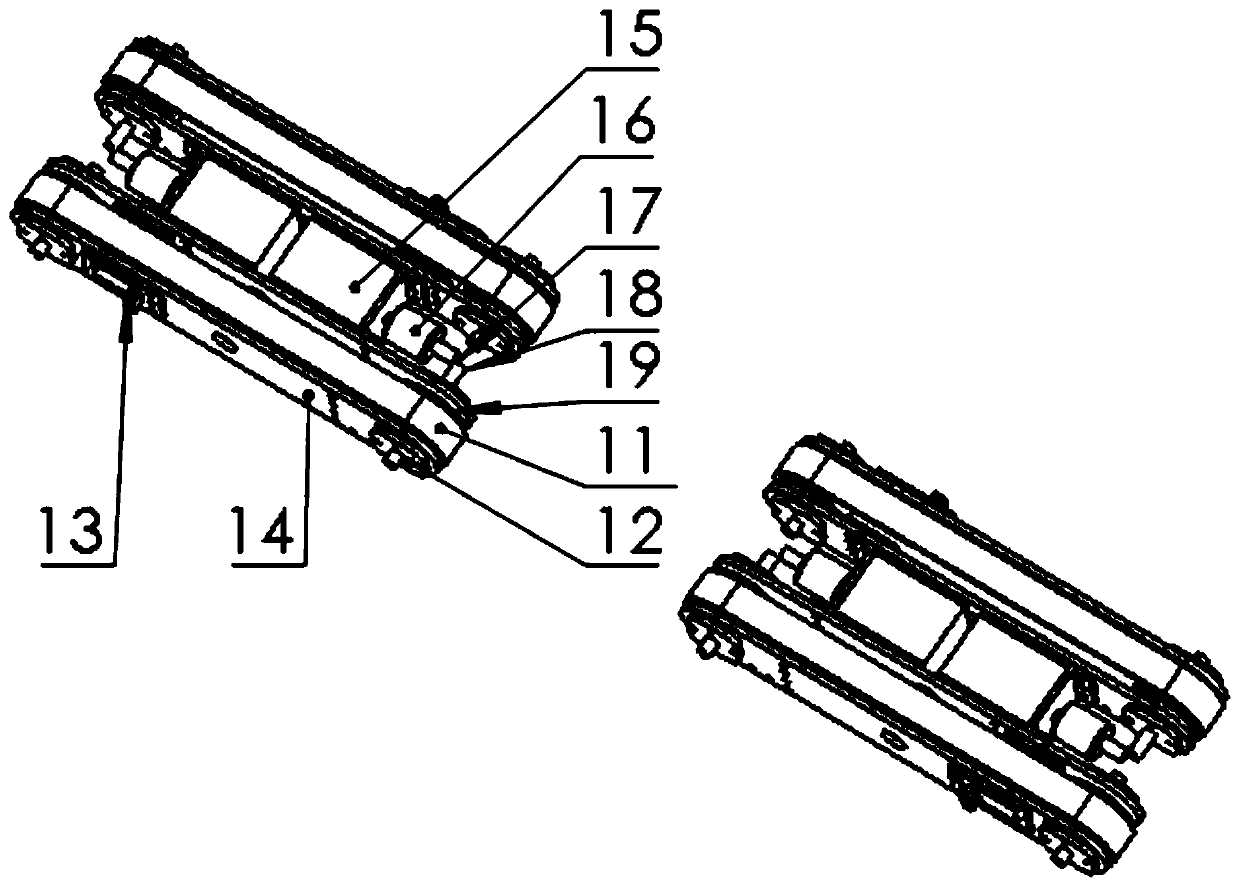
[0045] The walking mechanism is composed of four walking units with the same structure, each walking unit is controlled by a walking stepper motor 15, two walking units are a group, and the two groups are placed according to the front and rear positions;
[0046] The diameter reducing mechanism is composed of two parts with the same structure,
[0047] The traveling mechanism includes four crawlers and eight crawler wheels, eight crawler support axles, four walking stepper motors and eight crawler frame frames. The four crawlers are distributed at the four corners to improve stability. The crawler 11 is installed on the crawler 19. One crawler Supported by two track wheels, the track wheels are all installed on the cor...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More