

An unmanned lane line detection method based on a generative adversarial network
A lane line detection and unmanned driving technology, applied in character and pattern recognition, instruments, computer components, etc., can solve problems such as too smooth and lack of realism
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] The present invention will be further described below in conjunction with the accompanying drawings.
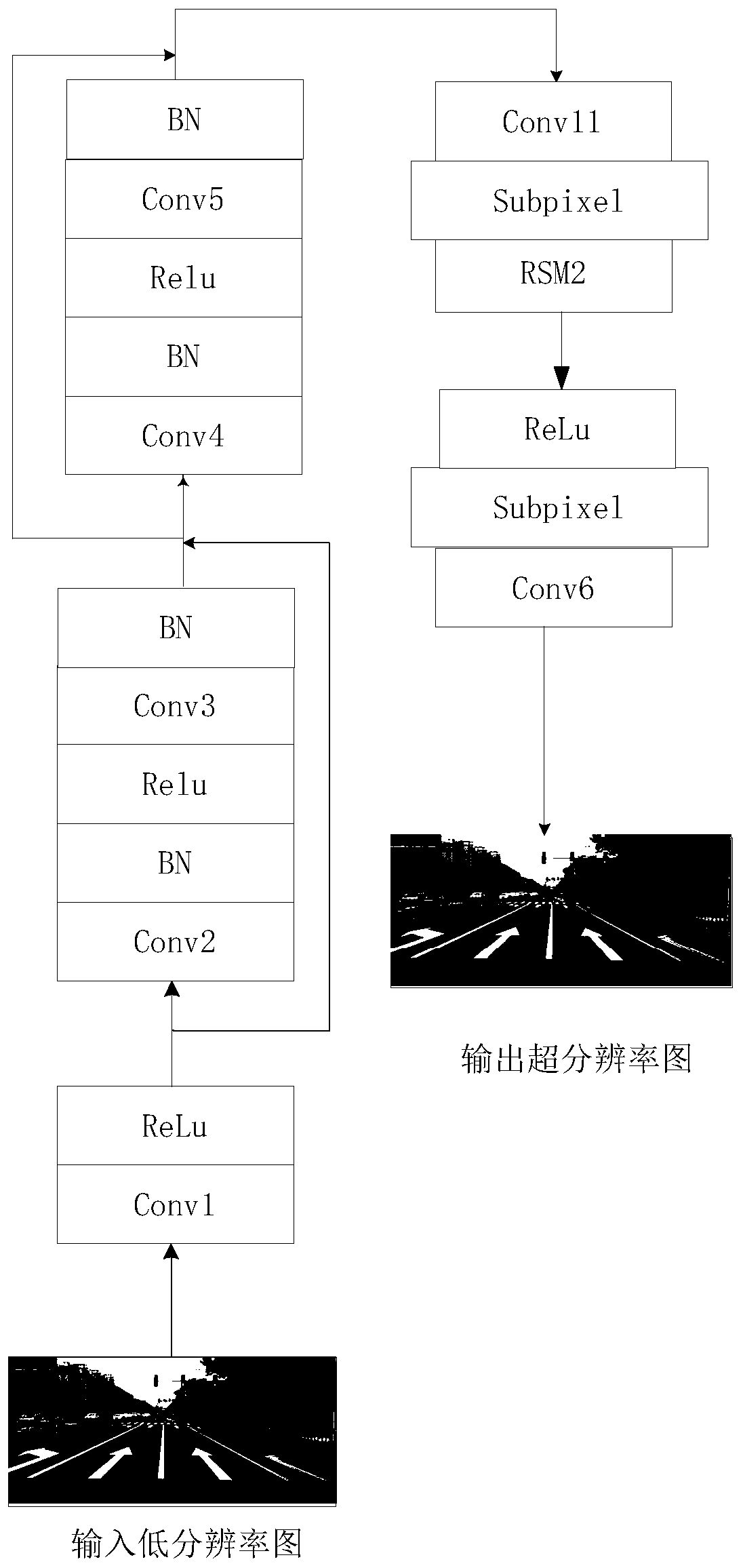
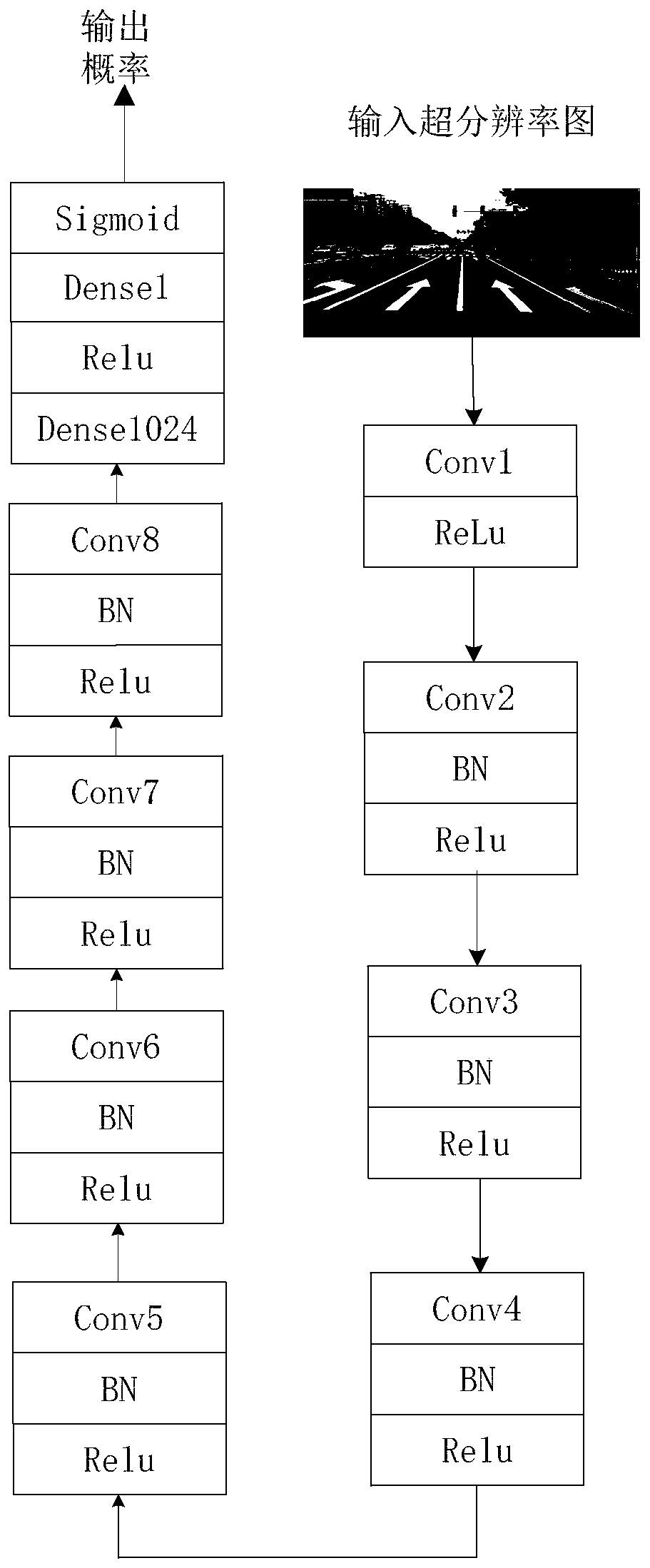
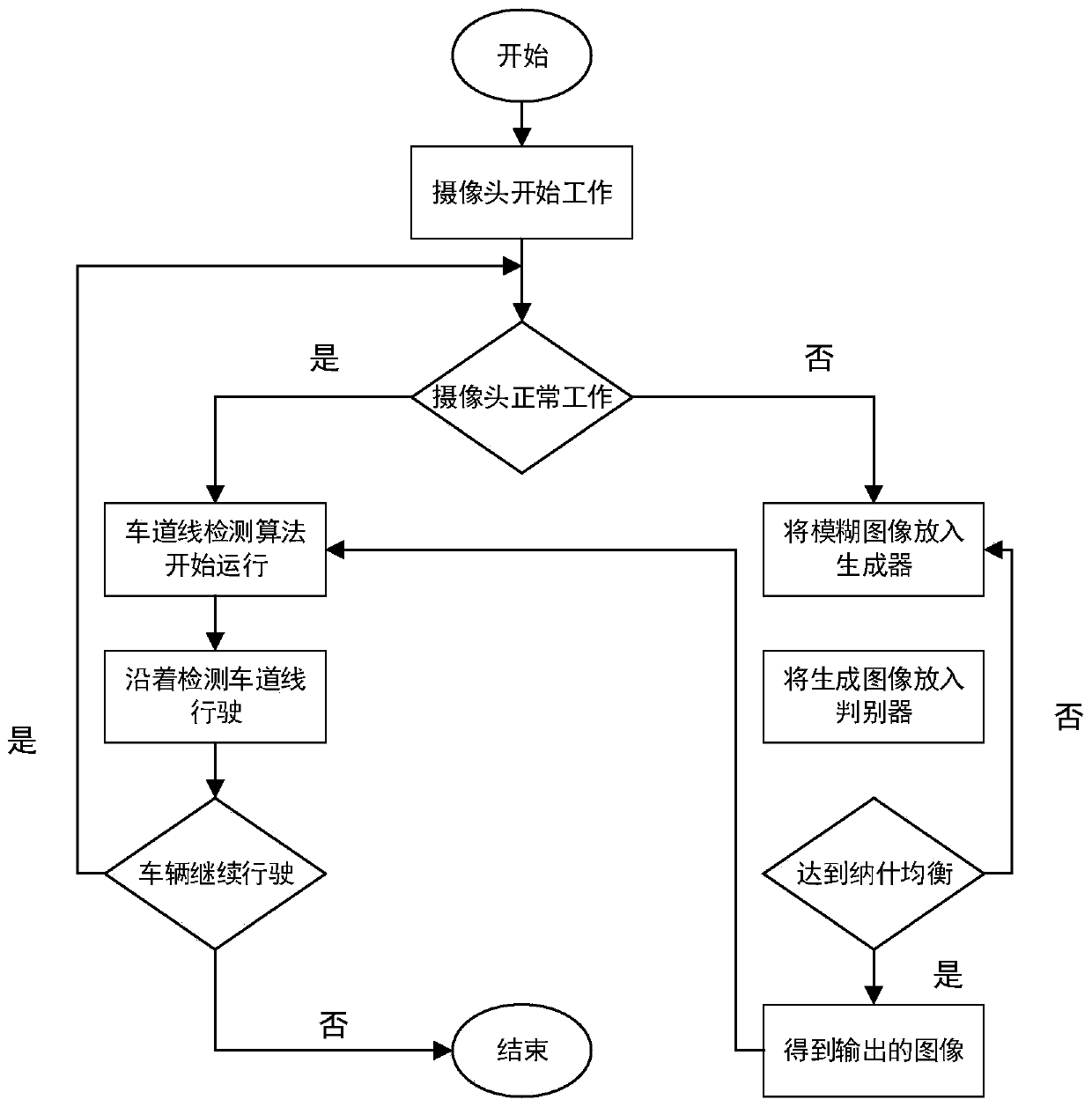
[0041] A lane detection method for unmanned driving based on a generative confrontation network, including three parts: the generation network of the lane line picture, the discriminant network and the detection algorithm; Input the generation network to generate super-resolution pictures, input the high-resolution pictures and super-resolution pictures into the discriminant network for accuracy judgment, and capture the data distribution of super-resolution pictures and high-resolution pictures according to the judgment results, generate network and discriminant network Based on the data distribution, the confrontation training is carried out until the Nash equilibrium is reached, and the optimized generation network is obtained, and the super-resolution image generated by the optimized generation network is input into the detection algorithm for lane line recognition....
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More