

Peristaltic intra-pipeline crawling device and control method thereof
A technology of crawling device and pipeline, applied in the direction of special pipe, pipe element, pipe/pipe joint/pipe fitting, etc., can solve the problem of poor robot stability, achieve good stability and economy, reduce failure rate and consume less energy Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
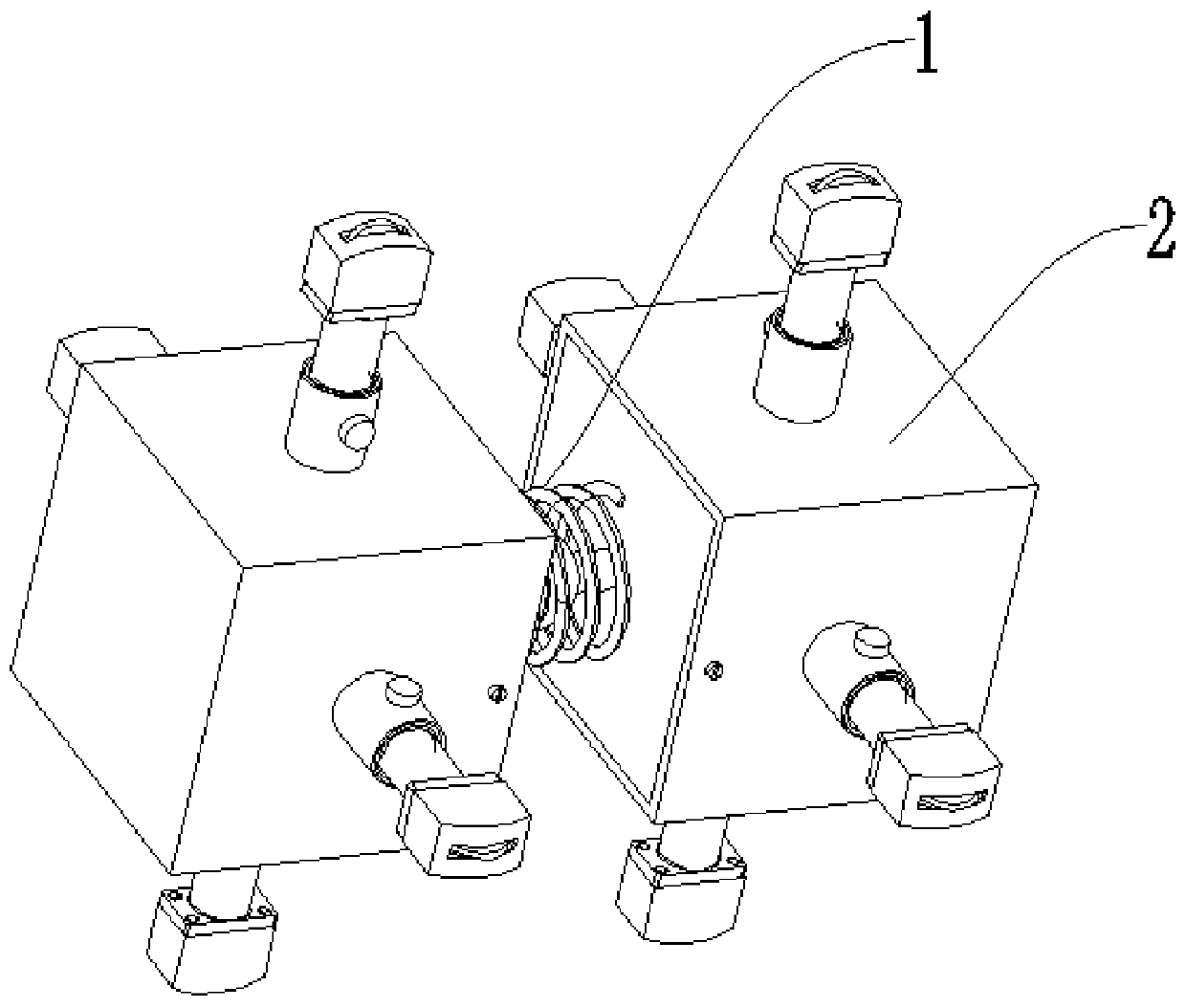
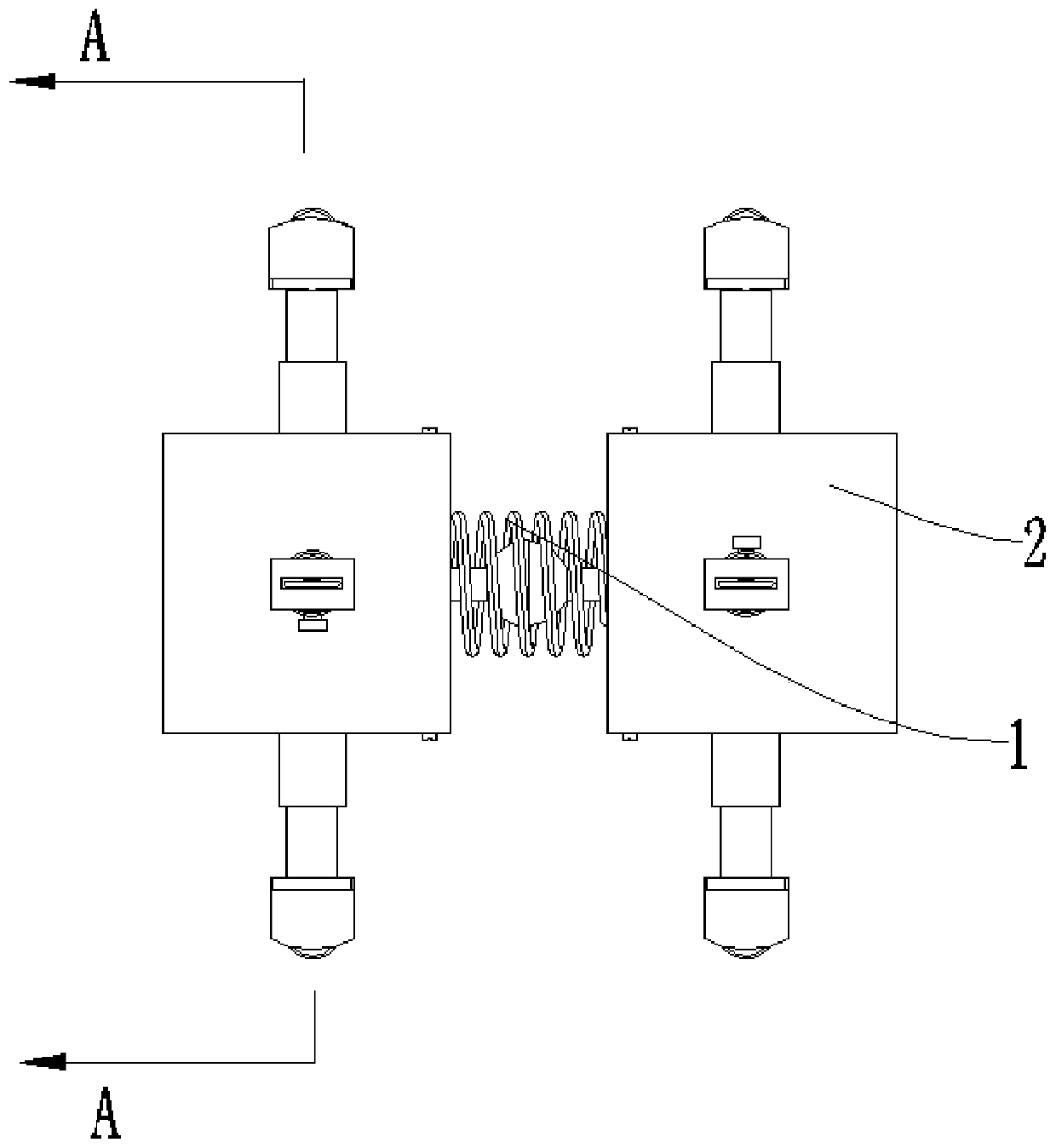
[0050] refer to Figure 1-5 As shown, the embodiment of the present invention provides a peristaltic crawling device in a pipeline, including: a propelling part 1 and at least two feet 2 . The propelling part 1 and at least two of the feet 2 form a crawling structure imitating a crawling animal, and rely on the friction between the feet 2 and the pipeline to make the crawling device crawl in the pipeline. Optionally, the bionic peristaltic crawling device in the pipeline can be provided with several propelling parts 1 and feet 2, and several propelling parts 1 and the feet 2 are alternately arranged to form a multi-stage peristaltic crawling structure, which can increase its motion stability sex and flexibility.
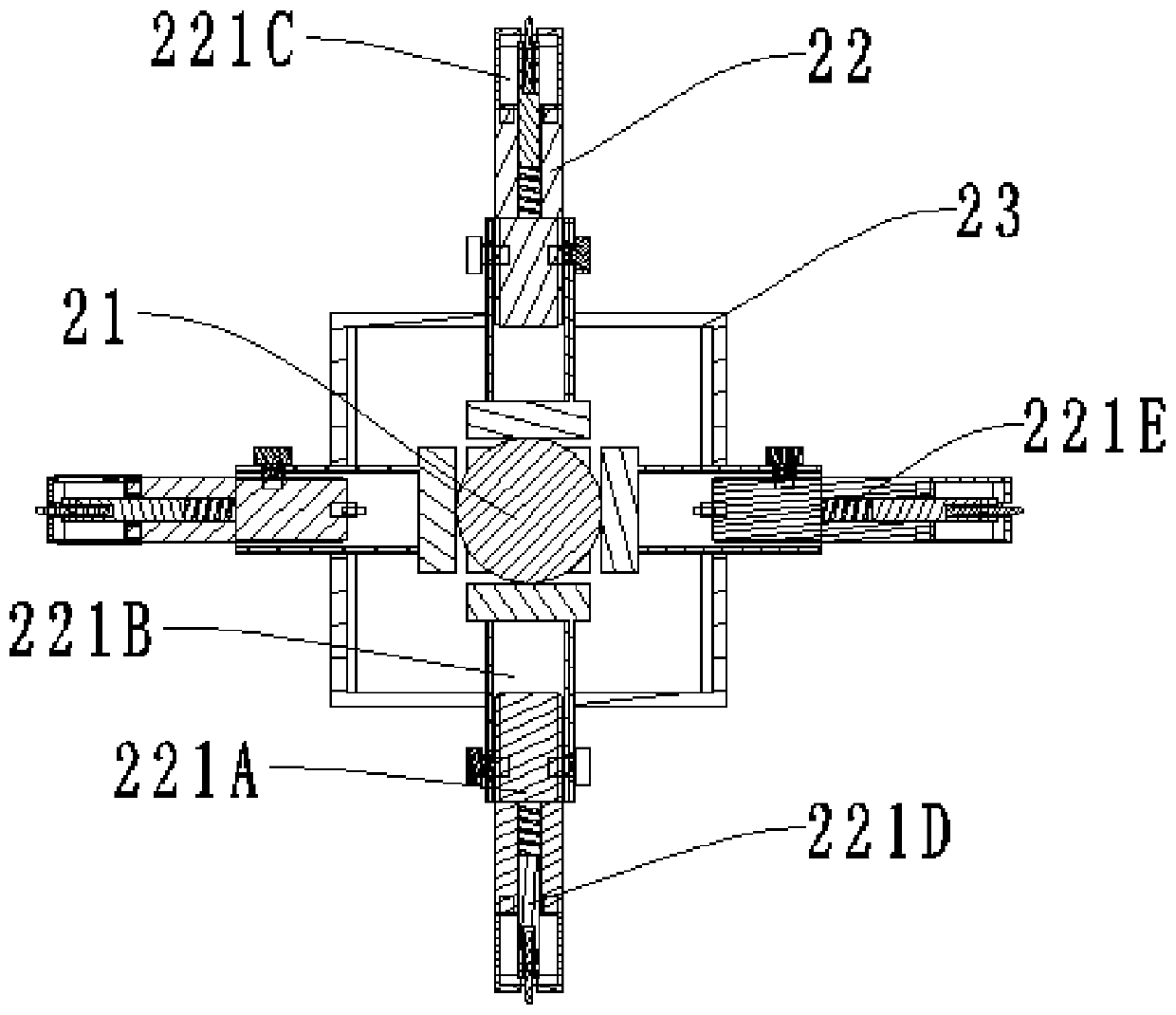
[0051] The foot 2 includes: a spherical air bag 21 , a plurality of support rods 22 arranged around the spherical air bag 21 along the radial direction of the pipeline, and an air pump assembly (not shown in the figure). The support rod 22 includes a shaft 221 and ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More