

A Gaussian Process Regression Based Acceleration Prediction Method for Front Vehicles of Intelligent Connected Vehicles
A technology of Gaussian process regression and prediction method, which is applied in the field of acceleration prediction of intelligent networked vehicles based on Gaussian process regression. , the effect of less method parameters
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0043] The method of the present invention will be described in further detail below in conjunction with the accompanying drawings.
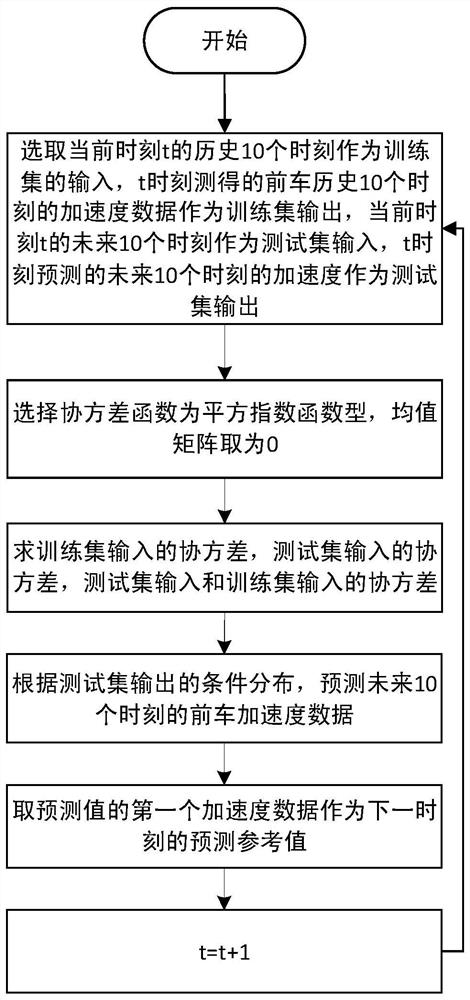
[0044] refer to figure 1 and figure 2 , a method for predicting the acceleration of a front vehicle based on a Gaussian process regression, the method comprising the steps of:
[0045] 1) Select the training set sample, and measure the acceleration data a(t-10), a(t-9),...,a(t-1) of the vehicle in front at 10 (n takes 10) historical moments at time t, so that time x i =t-11+i, acceleration sample value y i =a(t-11+i), i=1,2,...,10, let X={x 1 ,x 2 ,...,x i} is expressed as 10 historical moments at the current moment t, Y={y 1 ,y 2 ,...,y i} is expressed as the acceleration data of the vehicle in front at 10 historical moments measured at the current moment t; X is used as the input of the training set, and Y is used as the output of the training set, where Y obeys the Gaussian distribution, see formula (1):
[0046] Y=F(X,X)~N(M(X,X),K(...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More