

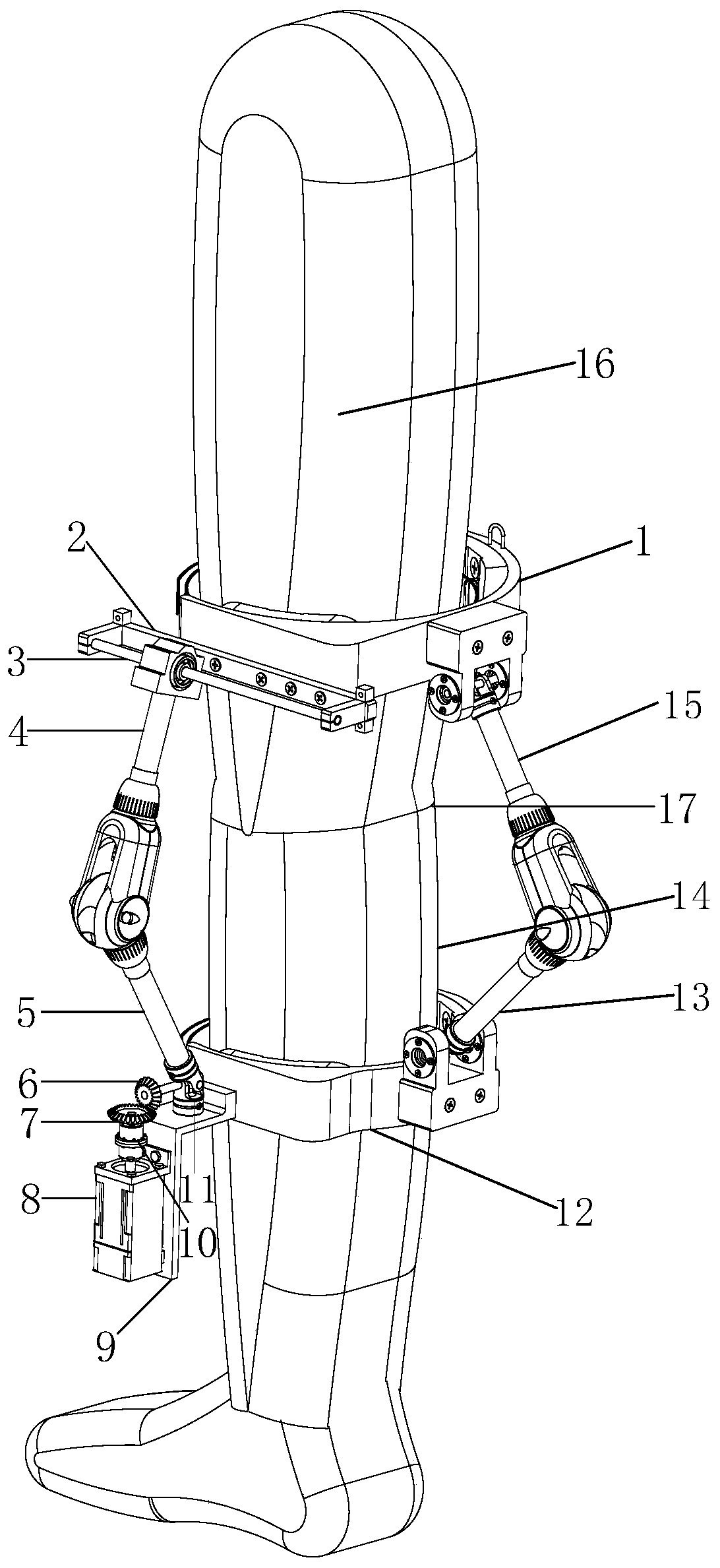
Human-computer fusion knee joint rehabilitation robot
A rehabilitation robot and knee joint technology, applied in passive exercise equipment, physical therapy, etc., can solve the problem of the deviation of the instantaneous center of rotation between the human knee joint and the exoskeleton knee joint, and the relative displacement between the human knee joint and the exoskeleton, which cannot be guaranteed Overlap and other problems at any time to achieve the effect of enhancing the rehabilitation effect, avoiding secondary injuries, and simple and convenient control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
[0023] The purpose of the present invention is to provide a human-machine fusion knee joint rehabilitation robot to solve the problems existing in the prior art, realize the automatic compensation of the instantaneous rotation center misalignment in the flexion and extension movement of the human knee joint, and realize motion decoupling at the same time, so as to avoid Joints suffer from secondary injuries, improve wearing comfort, and enhance the effect of kn...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More