

A three-degree-of-freedom robot leg system based on synchronous belt transmission
A technology of synchronous belt transmission and degree of freedom, applied in the field of robotics, can solve problems such as large joint modules, achieve the effects of reducing weight, ensuring structural strength, and improving dynamic response characteristics
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
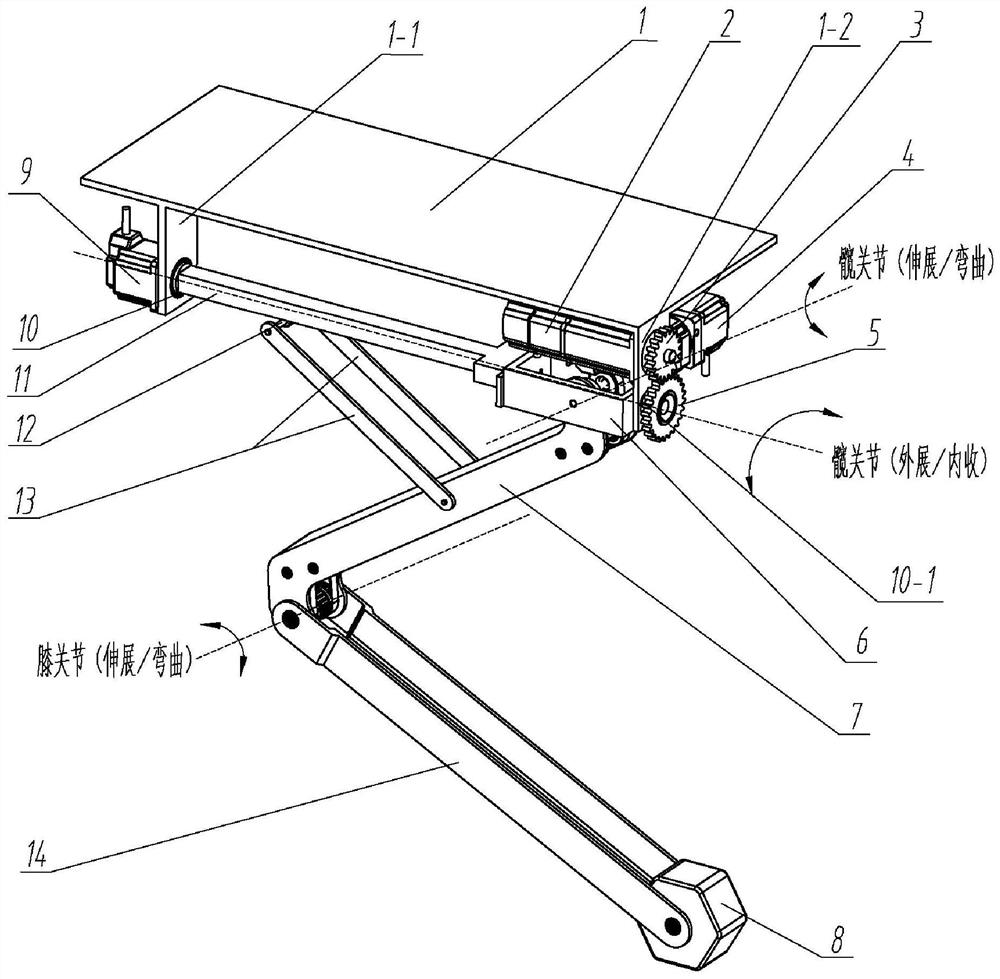
[0043] image 3 Among them, two mounting plates protrude from the lower side of the robot body, which are connected with the ball screw mounting rod seat through the bearing;
[0044] The hip joint "abduction / adduction" driving motor and its integrated gear box are also installed on the mounting plate on the lower side of the robot body, and the driving force of the joint "abduction / adduction" is transmitted to the hip joint "outside" through gears and gears. "Extension / Adduction" motion base;
[0045] The "abduction / adduction" movement base of the hip joint is fixedly connected with the ball screw mounting rod seat; the front end of the ball screw mounting rod seat protrudes through the inner ring of the bearing, and the hip joint "extension / bending" driving motor is installed;
[0046] Such as Figure 4 As shown in the figure, the screw installed inside the ball screw mounting rod base rotates under the drive of the motor to push the ball screw nut to move left and right; ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More