Small unmanned aerial vehicle track and attitude correction method based on flight simulator
A technology for flight simulators and small UAVs, applied in attitude control, instruments, non-electric variable control, etc., can solve problems such as errors, poor communication signals, and UAV congestion operations, and achieve the effect of improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
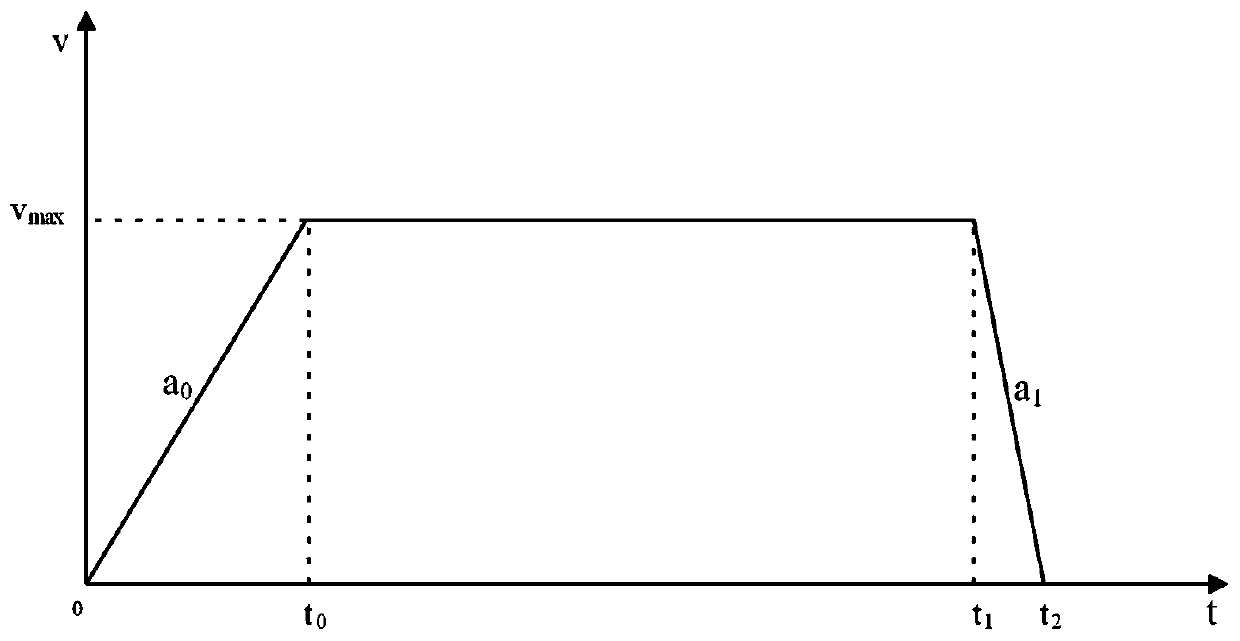
[0032] Such as image 3 Shown is a graph representing the relationship between drone flight time and drone speed. The control end passes through consecutive equal intervals t Δ Send instructions to the UAV side, assuming that the total time of the entire movement process of the UAV is t, then:
[0033] [t / t Δ ] = k (1)
[0034] The whole movement process of the UAV can be divided into three parts, the uniform acceleration movement in the initial stage, the acceleration is a 0 ; when the velocity reaches the maximum velocity v max , the UAV keeps moving forward at a constant speed; finally, it decelerates uniformly until it stops, and the acceleration at this time is a 1 . Therefore, the relationship between the flight distance s and the flight time t of the UAV can be obtained as follows:
[0035]
[0036]
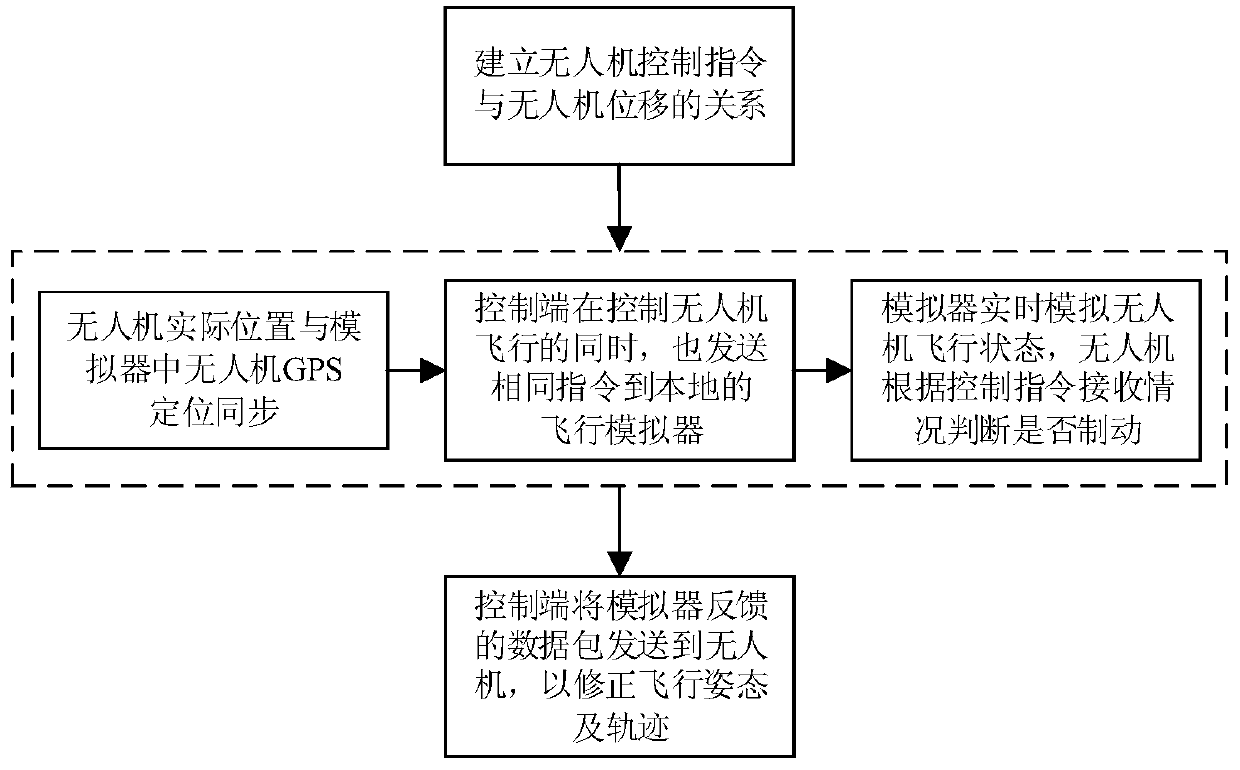
[0037] Before the drone takes off, the actual position of the drone is synchronized with the GPS positioning of the drone in the simulator, so that the real pos...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More