

Method for calculating shot object coordinate by using double-fish-eye image and image acquisition device
An image acquisition device, fisheye image technology, applied in the direction of using optical devices, computing, measuring devices, etc., can solve the problems of shooting range limitation, user movement space limitation, limited and so on
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
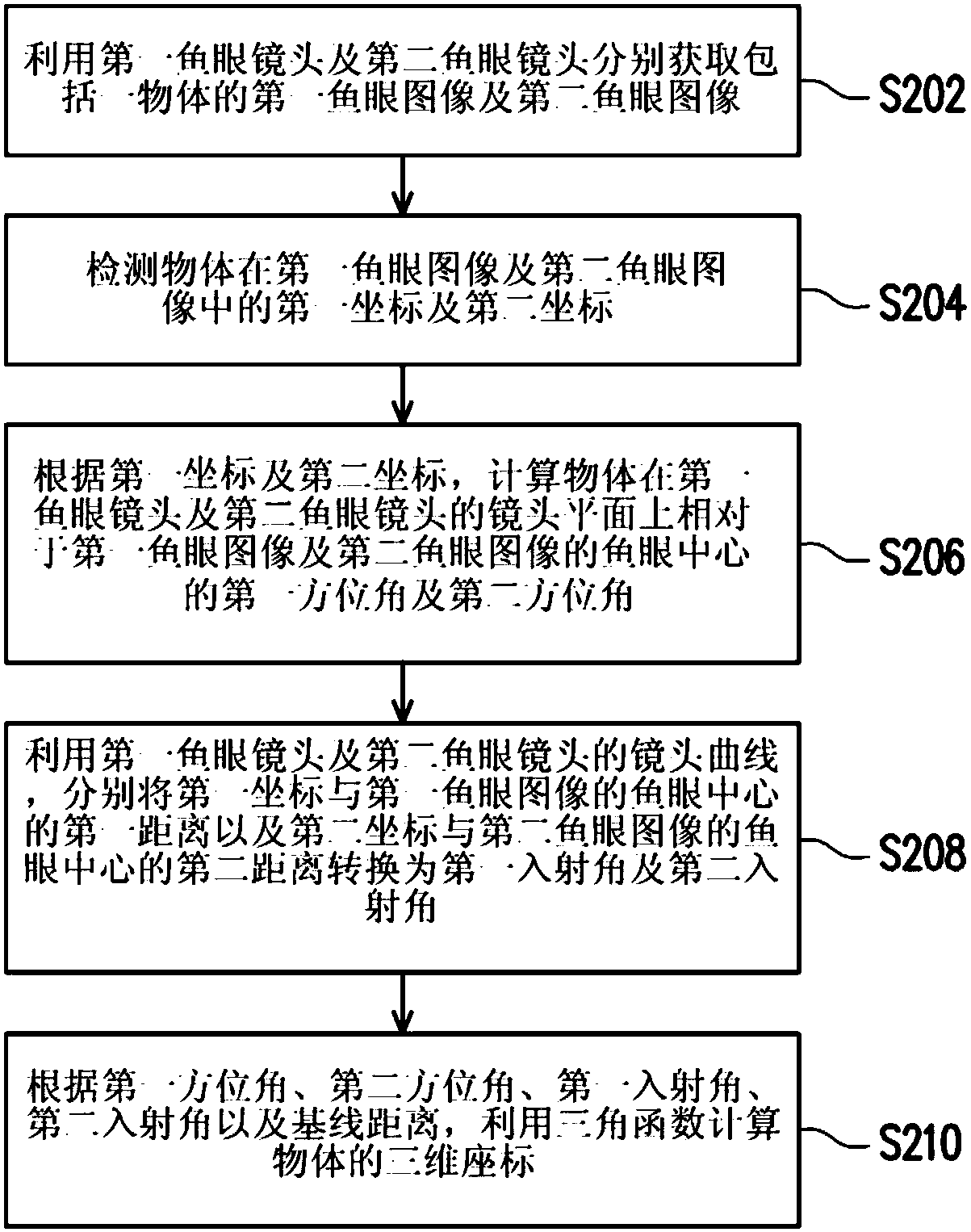
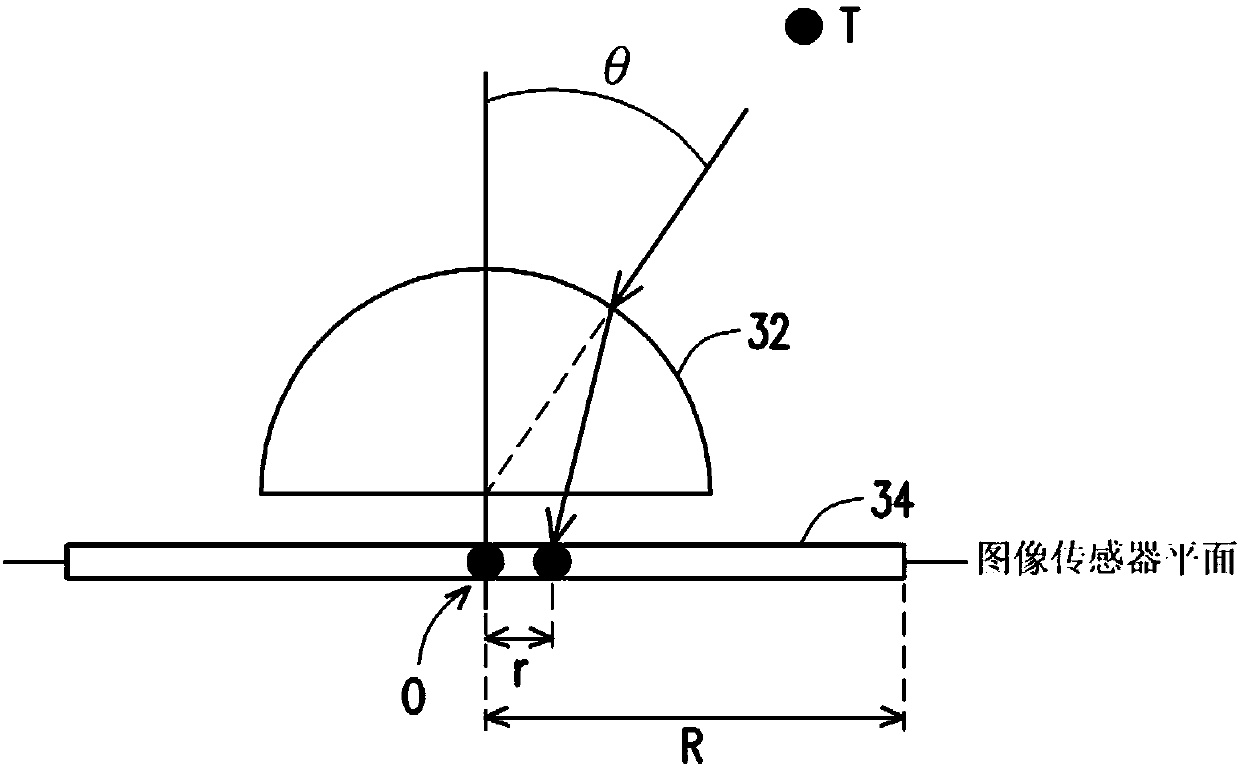
[0051] Since the fisheye lens adopts an equi-distance lens, the incident angle of light received from an object (such as a photosphere) will have a nearly linear relationship with the projection radius of the light on the image sensor. Accordingly, the present invention detects the position of the object in the fisheye image, uses the above relationship to deduce the incident angle of the object’s light emission, and combines the azimuth angle of the object on the lens plane to calculate the position of the object at Three-dimensional coordinates in space. Thereby, the present invention can realize the calculation of the three-dimensional coordinates of the photographed object under the condition of increasing the photographing field of view without performing geometric transformation.
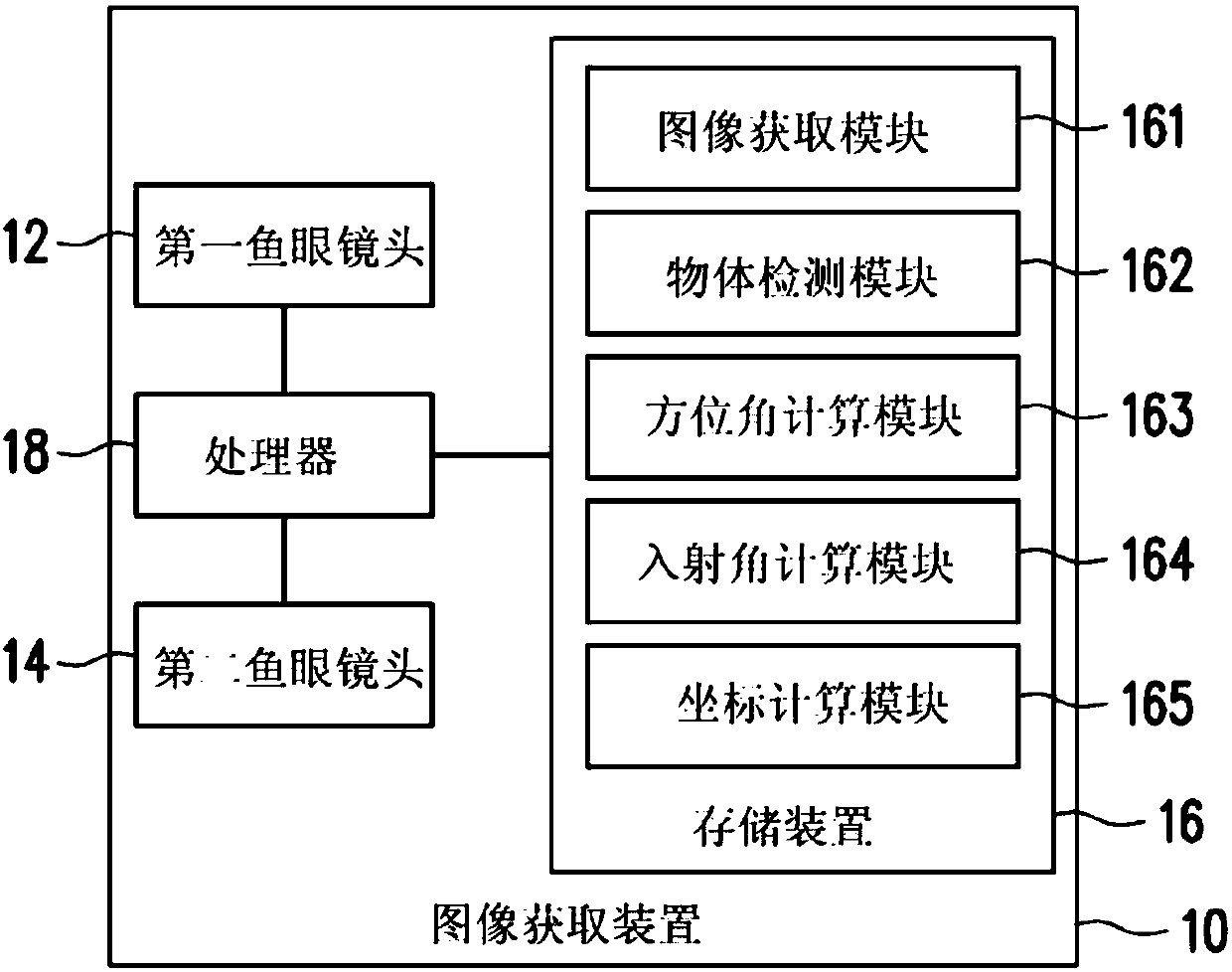
[0052] figure 1 is a block diagram of an image acquisition device according to an embodiment of the present invention. Please refer to figure 1 The image acquisition device 10 of this embod...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More