Amphibious robot propelled by undulating fins
An amphibious and robotic technology, applied in the field of robotics, can solve the problems of high control difficulty, low pass rate, and low energy efficiency, and achieve the effect of low control difficulty, high pass rate, and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
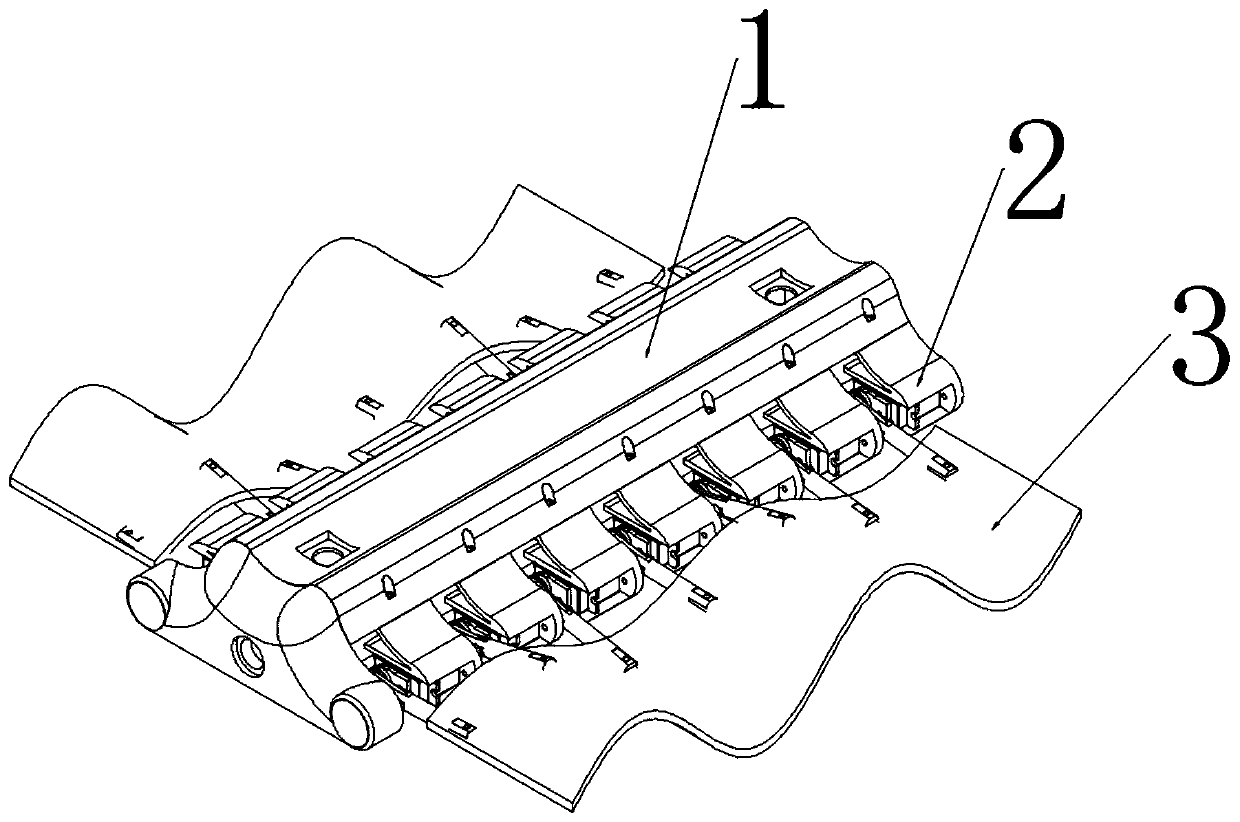
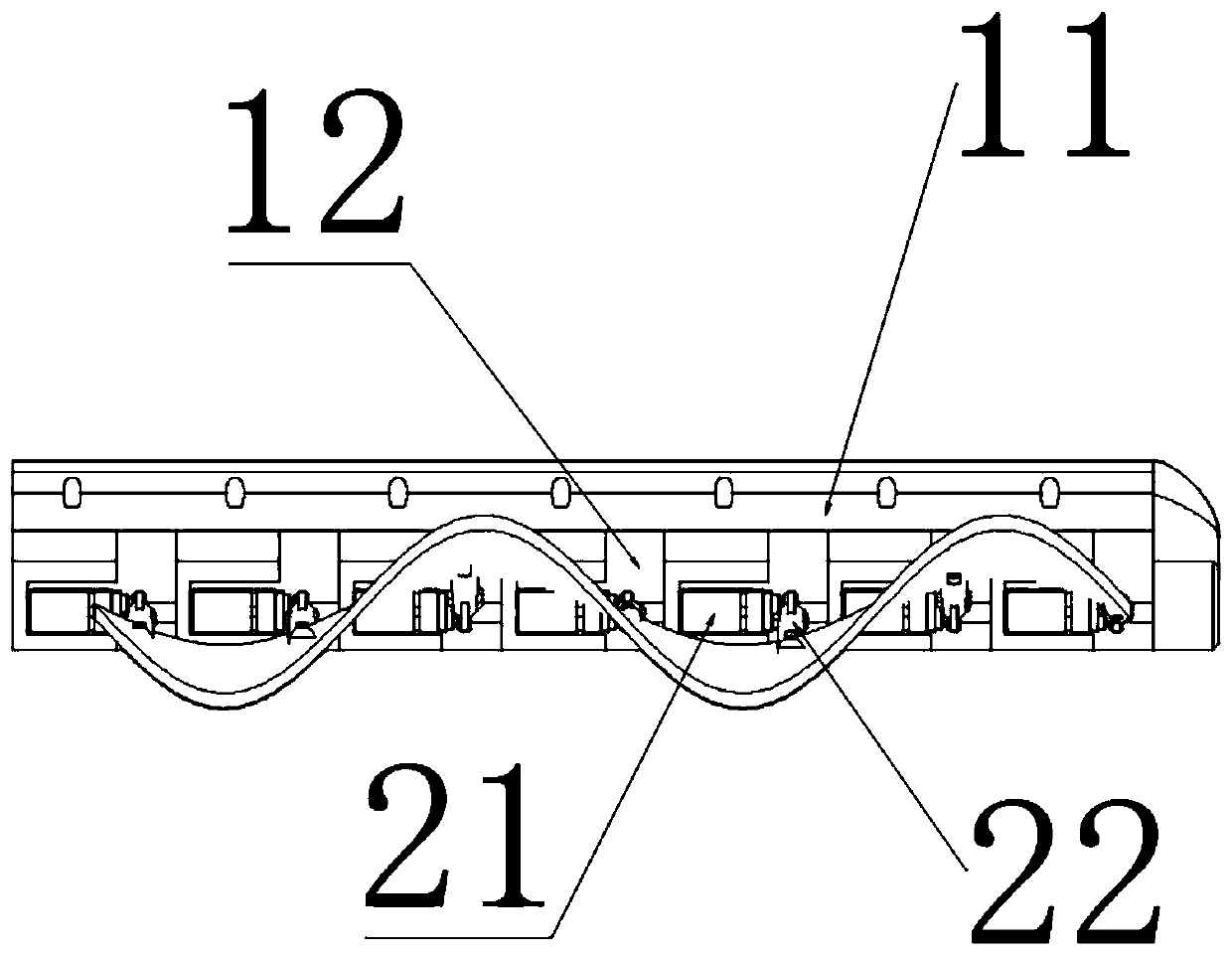
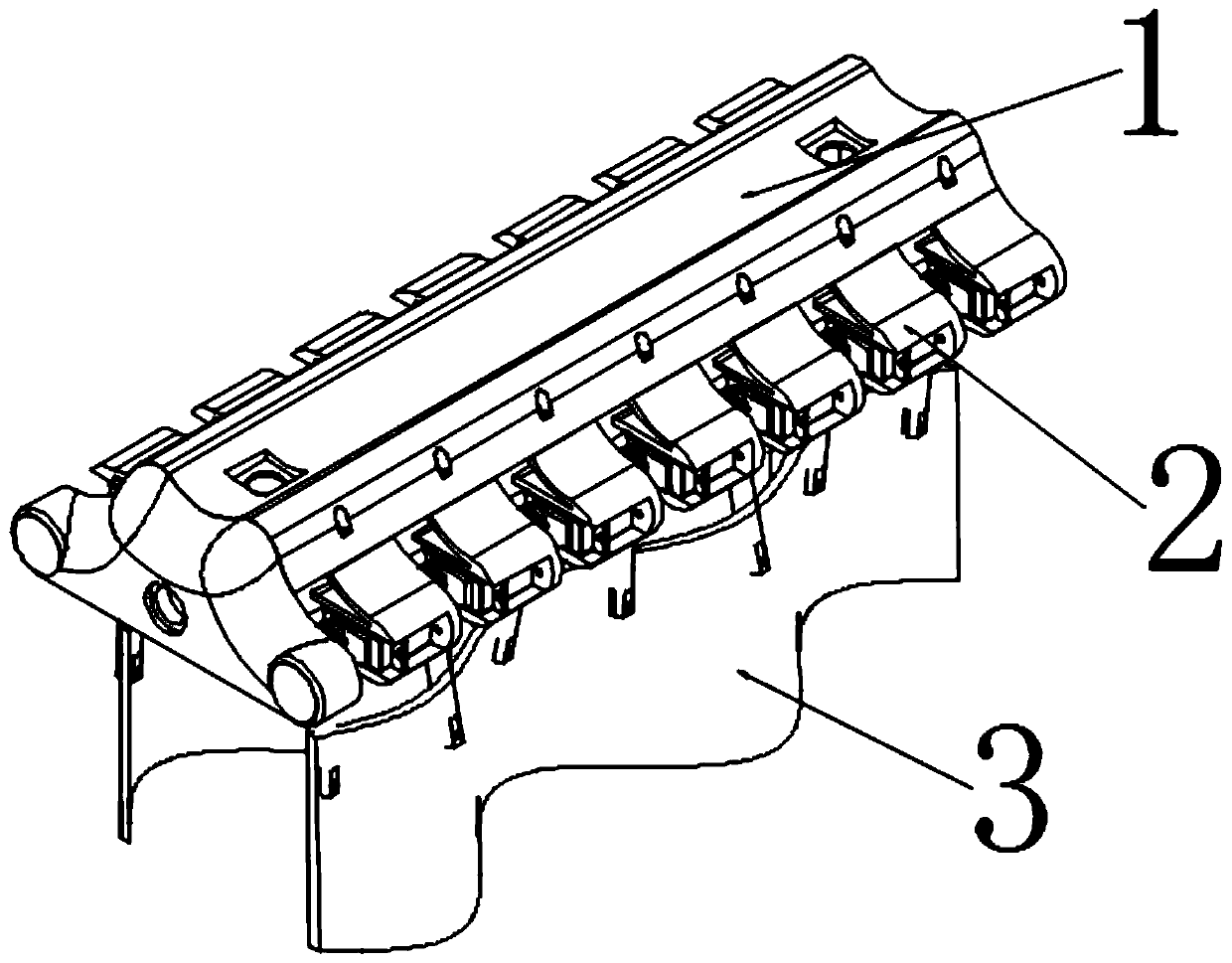
[0025] Such as Figure 1~2 As shown, an amphibious robot propelled by undulating fins in the present invention is characterized in that it includes a body 1, a driving arm unit 2 and an undulating fin 3, and seven driving arm units 2 are respectively arranged on the left and right sides of the body 1, One end of the driving arm unit 2 is connected to the body 1 and the other end is connected to the undulating fin 3, the undulating fin 3 is formed by bending a fan-shaped plane, and the phase difference between the undulating fins 3 connected to two adjacent driving arm units 2 is the largest is 120 degrees, the driving arm unit 2 controls the undulating fin 3 to perform sinusoidal fluctuations, the side end surface of the undulating fin 3 connected to the driving arm unit 2 is the inner end surface, and the side end surface away from the driving arm unit 2 is the outer end surface, The edge line between the inner end face and the outer end face is a sinusoidal line, and the flu...
Embodiment 2
[0029] Such as Figure 3-4As shown, this embodiment is optimized on the basis of Embodiment 1, and there are 7 driving units on one side of the robot proposed in this application document. Under this structure, the phase difference between the drive arm units of the undulating fin is 120 degrees, and the total phase difference is exactly 720 degrees, which can meet this requirement. It needs to be explained that if the phase difference is too large, the load effect on the steering gear of the driving arm will also increase, and it may also make the undulating fin waveform unable to be effectively transmitted. If the phase is too small, the sine wave waveform with a total phase of 720 degrees cannot be provided. This paper After comprehensively analyzing various factors, the invention selects a drive structure consisting of 7 drive arm units on one side. The direction of movement of the robot on flat land is the same as the direction of propagation of the undulating fins (that...
Embodiment 3
[0031] Such as Figure 6 As shown, the application document is optimized on the basis of Embodiments 1 and 2. The electrical circuit includes a lithium battery module, a wireless receiver, a steering gear drive board, a main control board, a depth sensor, a gyroscope, and a servo motor. The lithium battery module supplies power to the main control board and the steering gear drive board. The main control board communicates with the steering gear drive board, depth sensor, and gyroscope through the I2C bus, and communicates with the wireless receiving module through the digital IO port. The main control board communicates through the The steering gear driving board is used to drive the driving arm unit 2 to move. Its electrical circuit such as image 3 As shown (the remote control is not part of the onboard circuit of the robot, so it is not marked in the figure). The lithium battery power module outputs 6V steering gear drive power and 5V main control board power supply. The...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Thickness | aaaaa | aaaaa |
| Hardness | aaaaa | aaaaa |
| Shore hardness | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More