

ICPF-driven centimeter level three-dimensional swimming bionic underwater minisize robot
A technology of micro-robots and drivers, applied in the direction of non-rotating propulsion components, etc., can solve the problems of low propulsion efficiency, inability to realize three-dimensional motion, poor fitting effect, etc., and achieve high energy conversion efficiency, small size, and low energy consumption. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The present invention is described in more detail below in conjunction with accompanying drawing example:
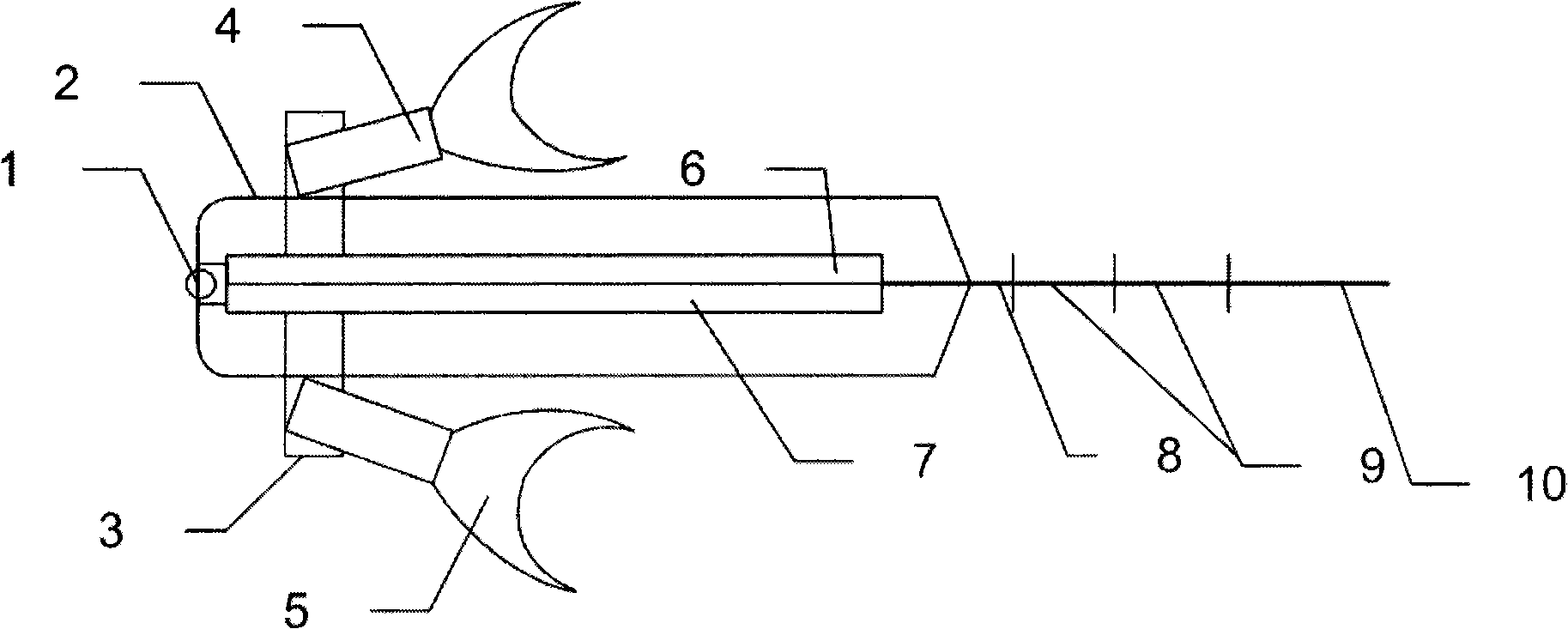
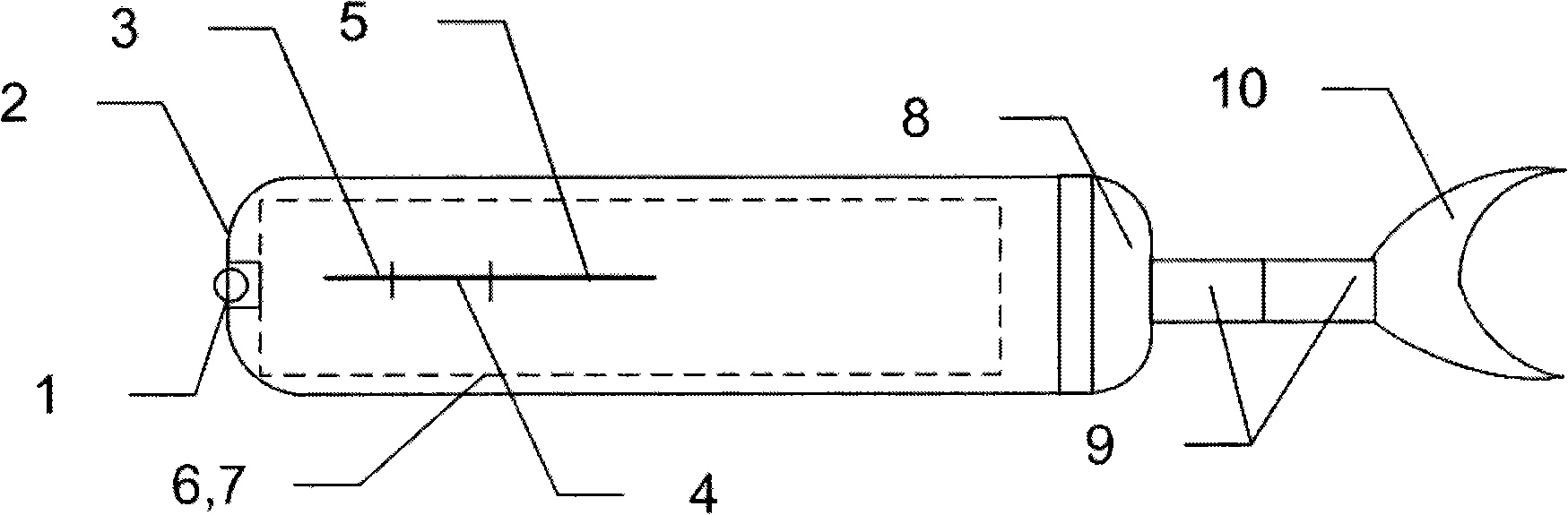
[0027] combine figure 1 , figure 2 , the ICPF-driven autonomous bionic underwater micro-robot consists of a control circuit 6 and a lithium polymer battery 7 arranged in the casing 2, and the rear end of the casing is connected with a harder sheet 8 that acts as a connection and a coordinated swing. The stiffer sheet and coordinating swinging action are connected to the ICPF driver 9, which is connected to the softer sheet 10 corresponding to the caudal fin. The front of the shell traverses a stiffer sheet 3 which acts as a connection and supports the pectoral fins, the ICPF driver 4 to one end of the sheet 3, and the other end of the ICPF driver 4 is connected to a softer sheet 5 which acts as a pectoral fin. An infrared sensor and a transmitter 1 are installed at the front end of the housing, and combined with Image 6 , the control circuit is composed of a ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More