

UAV Relative Pose Estimation Method for Fixed-point Landing Mark
A technology of relative pose and logo, applied in the field of UAV, can solve the problems such as the incomplete visual range of the logo, the inability to meet the practical needs of the mobile platform, and the limitation of the scope of application.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0070] In the drawings, the same or similar reference numerals are used to denote the same or similar elements or elements having the same or similar functions. Embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings.
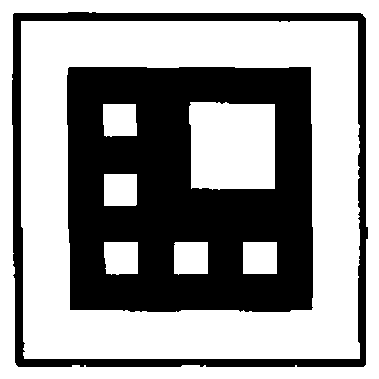
[0071]The UAV relative pose estimation method of the fixed-point landing sign is realized based on the image of the fixed-point landing sign (hereinafter referred to as "mark") collected by the UAV airborne camera as the information basis. Therefore, the shape design and detection method of the sign will directly affect the entire system. system performance. At present, most of the existing signs are placed on a fixed landing platform such as the ground, so the sign will not move, so the UAV airborne camera only needs to detect the sign within a period of time, and calculate the pose of the UAV relative to the sign platform information, and then land directly to the target point according to the calc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More